Общие сведения об операционных системах. Общие сведения обОБЩИЕ СВЕДЕНИЯ ОБ ЭЛЕКТРИЧЕСКИХ ИЗМЕРЕНИЯХдопроводный кран, если другая рука прикасается к включенному электрическому прибору. 4.Если ток постоянный, а нуль шкалы измерительного прибора находится слева, то подключение прибора в цепь производится с соблюдением полярности. 5.Все реостаты, включаемые в цепь, должны быть установлены на максимум сопротивления. 6.Все ключи и коммутаторы при сборке цепи должны быть разомкнуты; замыкать схему на источник питания без проверки схемы преподавателем или лаборантом строго запрещается. 7.Цепь подключается к источнику питания только на время измерений. 8.Запрещается производить переключения в схеме и оставлять без наблюдения схему, находящуюся под напряжением. 9.В электрической цепи, содержащей индуктивности, могут возникать мощные экстра токи в моменты её замыкания и размыкания. Поэтому даже низковольтные цепи с индуктивностями могут быть опасны. 10.Конденсаторы после выключения схемы несут на себе заряд, и их необходимо разряжать специальным разрядником перед тем, как к ним прикасаться. 11.Запрещается оставлять без наблюдения работающие электрические цепи. Если замечено зашкаливание приборов, исрение, дым или другие опасные и непонятные явления необходимо немедленно отключить источник питания и обратиться к дежурному инженеру в лаборатории. 12.После окончания работы необходимо отключить источник тока. Привести в порядок рабочее место. 13.При нарушении правил техники безопасности студент отстраняется от работы в лаборатории и допускается к ней только после дополнительного изучения и отчета по правилам техники безопасности в данной лаборатории. 1.Определения и классификация средств измерений1.1.Электрические измерения и единицы физических величинЗадачей электрических измерений является нахождение значений физических величин опытным путем с помощью специальных электротехнических средств и выражение этих значений в принятых единицах. Физическая величина (ФВ) — свойство, общее в качественном отношении многим физическим объектам или физическим системам, их состояниям и происходящим в них процессам. Электрическое сопротивление тела, напряженность электрического поля, масса, время и др. — все это физические величины. Размер единицы величины, вообще говоря, может быть любым. Однако измерения должны выполняться в общепринятых единицах. Такие единицы устанавливаются в каждой стране особым законодательством с учетом рекомендаций международных организаций. В СССР с 1 января 1963 г. введена Международная система единиц (СИ), от начальных букв слов Systeme International - интернациональная система. Основными единицами СИ являются: метр (м) — единица длины,килограмм (кг) — единица массы, секунда (с) — единица времени, ампер (А) — единица силы тока,кельвин (К) — единица термодинамической температуры, моль (моль) — единица количества вещества,кандела (кд) — единица силы света. Дополнительные единицы:радиан (рад) — единица плоского угла,стерадиан (ср) — единица телесного угла. Производные единицы международной системы образуются из основных и дополнительных единиц при помощи определяющих уравнений в соответствии с принципами построения систем единиц. Внесистемные единицы, допускаемые к применению, устанавливаются стандартами на единицы по отдельным областям измерений. Международная система единиц (СИ) является универсальной, так как охватывает все области измерений, и когерентной, т. е. такой системой, в которой производные единицы всех величин могут быть получены с помощью определяющих уравнений с численными коэффициентами, равными единице. Кроме того, как основные единицы, так и подавляющее большинство производных единиц системы СИ по своему размеру удобны для практического их применения. Значительное число единиц СИ: метр, килограмм, секунда, ампер, вольт и др. получили широкое распространение задолго до ее введения. Необходимость перехода к Международной системе единиц диктовалась требованиями повышения точности измерений, унификации и уточнения единиц физических величин. 1.2. Виды средств электрических измеренийСредствами электрических измерений называют технические средства, используемые при электрических измерениях и имеющие нормированные метрологические характеристики. Различают следующие виды средств электрических измерений: меры и электроизмери- тельные приборы. Мерами называют средства измерений, предназначенные для воспроизведения физической величины заданного размера. Различают однозначные меры, многозначные меры и наборы мер. Однозначная мера воспроизводит физическую величину одного размера; многозначная мера воспроизводит ряд одноименных величин разного размера. Примером многозначных мер может служить конденсатор переменной емкости, вариометр для плавного изменения индуктивности и др. Набор мер представляет собой специально подобранный комплект мер, применяемых не только по отдельности, но и в различных сочетаниях с целью воспроизведения ряда одноименных величин различного размера. Примерами набора мер являются магазины сопротивлений, емкостей и др. Электроизмерительными приборами называют средства электрических измерений, предназначенные для выработки сигналов измерительной информации, т. е. сигналов, функционально связанных с измеряемыми физическими величинами, в форме, доступной для непосредственного восприятия наблюдателем. Они весьма разнообразны по своему принципу действия и конструктивному оформлению вследствие различных требований, предъявляемых к ним. 1.3. Классификация электроизмерительных приборовЭлектроизмерительные приборы могут быть классифицированы по различным признакам. Электроизмерительные приборы, показания которых являются непрерывными функциями изменений измеряемых величин, называются аналоговыми приборами. Электроизмерительные приборы, автоматически вырабатывающие дискретные сигналы измерительной информации, показания которых представлены в цифровой форме, назы- ваются цифровыми приборами. В зависимости от того, допускает ли электроизмерительный прибор только считывание показаний или допускает считывание и регистрацию показаний в той или иной форме или только регистрацию, все приборы могут быть разделены на две группы: показывающие приборы ирегистрирующие приборы. По характеру применения различают следующие приборы: 1)стационарные, т. е. такие, корпуса которых приспособлены для жесткого крепления на месте установки; 2)переносные, т. е. такие, корпуса которых не предназначены для жесткого крепления на месте установки. В зависимости от степени защищенности приборы бывают: 1.обыкновенными; 2.пыле-,водо-,брызгозащищенными; 3.герметическими и др. По роду измеряемой величиныприборы делятся на: 1.амперметры— для измерения тока; 2.вольтметры — для измерения напряжения; 3.омметры — для измерения сопротивления и т. п. Кроме указанных классификаций, существуют и другие, они будут рассмотрены при изучении курса электрических измерений. Измерить какую-либовеличину – сравнить ее с другой однородной величиной, принятой за единицу измерения. Устройство, предназначенное для сравнениякакой-либовеличины с единицей ее измерения, называется измерительным прибором. 1.4.Основные части электроизмерительного прибора Косновным частям электроизмерительного прибора (ИП) относятся: 1.Корпус; 2.Зажимы; 3.Шкала; 4.Указательная стрелка; 5.Измерительный механизм; 6.Винт корректора (для установки стрелки на нулевую отметку перед измерением, ограничители). На корпусе некоторых приборов расположены: переключатель пределов измерения иар- ретир. Арретир служит для закрепления измерительного механизма при транспортировке. Измерительные механизмы любой системы имеют ряд общих механических частей: спиральные пружины, оси или полуоси с подпятниками, противовесы, корректор.
который гасит колебания стрелки после отклонения. Различают воздушные и магнитоиндукционные успокоители. 2. Классификация электроизмерительных приборовВсе электроизмерительные приборы (ЭИП) классифицируют по следующим основ- ным признакам: а) по роду измеряемой величины: амперметры, вольтметры, омметры, ваттметры, счетчики и др. б) по роду тока: приборы постоянного тока, переменного тока и приборы постоянного тока и переменного тока. в) по принципу действия: магнитоэлектрические, электромагнитные, электродинамические, индукционные, тепловые и др. г) по степени точности: различают приборы восьми классов точности – 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4,0. Разность между показанием прибора и действительным значением измеряемой величины называется абсолютной погрешностью прибора: А – показания рабочего прибора;Ад – действительное значение величины (показание образцового прибора). Выраженное в процентах отношение абсолютной погрешностью прибора к наибольшему значению, которое может быть измерено по шкале этого прибора, называет-
Апр – наибольшее значение величины, которое может быть измерено данным прибо- ром (предел измерения прибора). Наибольшую допустимую относительную приведенную погрешность прибора называют классом точности этого прибора. Существует восемь классов точности этого прибора, наиболее точными приборами являются приборы 0,05 (первого класса точности). Приборы первых четырех классов точ- ности применяют для точных лабораторных измерений. Класс точности прибора наносят на шкалу ЭИП в виде числа из двух значащих цифр, иногда обведенных окружностью, иногда подчеркнутых. Шкала прибора служит для отсчета значения измеряемой величины. Делением шкалы называется расстояние между двумя ближайшими друг к другу отметками на шкале. Ценой деления С называется значение электрической величины, приходящееся на одно деление шкалы.
Например, имеется прибор, который может измерить напряжение от 0 до 250В (250В - предел измерения). Шкала этого прибора разделена, на 50 делений. Тогда: С=250:50=5В/дел, аS=50:250=0,2 дел/В. Шкалыбываютравномернымиинеравномерными. Нашкалеспомощьюусловных знаков дается подробная техническая характеристика прибора. На шкале прибора указывают: 1) его наименование или буквенное обозначение. Например, mA илиμΑ и т.д. По наименованию единицы измеряемой величины дается наименование прибора. 2)Класс точности. Класс точности указывают в виде числа из одной или двух значащих цифр (например – 0,5 или 2,5). 3)Род тока -постоянный /— /или переменный / ~ /, постоянный и переменный - ~ . 4)Система измерительного механизма прибора. Она обозначается на шкале специальным знаком, представляющим собой схематическое изображение основного узла, от которого зависит принцип действия прибора.
5) Символ установки прибора при измерениях: 1.(вертикальное - ↑, 2.горизонтальное - →, 3.или под углом - 6) Пробивное напряжение изоляции. На шкале указана величина напряжения, при которомбылаиспытанапрочность изоляции, обозначается она так: 7)Степень защищённости от внешних магнитных полей. 1.Степень защищенности от внешних магнитных полей обозначают римскими цифрами I, II, III, IV. Меньшая цифра означает лучшую защиту. 8)Условия работы прибора при соответствующей температуре и отно- сительной влажности обозначаются на шкале буквами:
9) Абсолютная погрешность прибора Абсолютная погрешность, которую дает измерительный прибор при измерениях, рассчитывается по формуле:
Обозначения основных систем измерительных механизмов электроизмерительных приборов приведены в таблице 1.
studfiles.net 1. Общие сведения об организации
30 МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ ХЕРСОНСКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КАФЕДРА ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ ОТЧЕТ По производственной практике Выполнил Бондаренко А. В. ст. гр 3ПР1 Проверил Боскин О.О Херсон 2010 СОДЕРЖАНИЕ ВВЕДЕНИЕ………………………………………………………………………3 1.ОБЩИЕ СВЕДЕНИЯ ОБ ОРГАНИЗАЦИИ………………………………….4 1.1 Краткое описание организации……………………………………….4 1.1.1 Правовой статус компании……………………………………5 1.1.2 Цель создания и предмет деятельности компании………….5 1.2 Описание отделов компании………………………………………….6 1.2.1 Коммерческий отдел………………………………………….7 1.2.2 Бухгалтерский отдел………………………………………….8 1.2.3. Строительный отдел………………………………………..10 1.2.4 Гараж………………………………………………………….10 2.АНАЛИЗ АСБУ ДЛЯ ООО «УКРНЕФТЕЭКОТЕХНОЛОГИИ»………….11 2.1 Анализ бухгалтерских программ для строительных фирм………..11 2.2 Система программ «1С:Предприятия»………………………………14 2.3 Анализ изменений типовой программы «1С:Бугалтерия 8.0»……21 2.4 Аппаратные средства АСБУ…………………………………………22 2.5 Программные средства АСБУ………………………………………23 ВЫВОДЫ………………………………………………………………………...28 ЛИТЕРАТУРА…………...………………………………………………………29 ВВЕДЕНИЕ Особенностями современного этапа развития науки, промышленности и рынка являются компьютеризация и повсеместное внедрение информационных технологий. Все более широко применяют информационные технологии, основанные на анализе данных с использованием современных статистических методов. Применение электронно-вычислительных машин (ЭВМ) для бухгалтерского учета улучшает организацию учетной работы, технологию сбора и регистрации сообщений о хозяйственных событиях, обработку и представление информации, позволяет создать автоматизированное рабочее место (АРМ) бухгалтера. Производственная практика является органической частью учебного процесса и имеет цель закрепить и углубить знания, полученные в процессе теоретической деятельности, приобщить студента к общественно-полезному труду и увязать полученные теоретические знания с реальными условиями производства. Производственнаяя практика должна проводиться на базовых предприятиях (организациях) под руководством опытных специалистов. Во время прохождения производственной технологической практики студенты-практиканты работают по режиму, установленному для данного предприятия и подчиняются правилам внутреннего распорядка этой организации. Целью производственной практики является изучение студентами реального предприятия и условий работы на нем, получение прикладных навыков в разработке и сопровождении программ, изучении информационных потоков и документооборота, способов хранения и обработки информации, сбор материалов для отчета и предварительный выбор вероятной темы дипломного проекта. Кроме того, во время прохождения практики студенты-практиканты должны также принимать активное участие в общественной жизни предприятия 1.1 Краткое описание организацииНазвание предприятия: ООО «Укрнефтеэкотехнологии» Адрес предприятия: Украина, Херсонская область, город Херсон, ул Ладычука, 125 Руководитель предприятия: Генеральный директор Коржов Анатолий Петрович Юридический статус: Общество с ограниченной ответственностью Месторасположение - Украина, Херсонская обл., г. Херсон 1.1.1 Правовой статус компанииООО компания «Укрнефтеэкотехнологии» является юридическим лицом, имеет самостоятельный баланс, может от своего имени заключать договоры, приобретать имущественные и личные неимущественные права и нести обязанности, быть истцом и ответчиком в арбитражном суде, суде и третейском суде. ООО компания «Укрнефтеэкотехнологии» имеет круглую печать, может иметь штамп и бланки с изображением своего наименования на украинском языке, эмблему и товарный знак, а так же прочие атрибуты юридического лица, открывает расчётные и иные счета в банках. ООО компания «Укрнефтеэкотехнологии» осуществляет все виды внешне экономической деятельности в установленном законодательством порядке. 1.1.2 Цель создания и предмет деятельности компанииЦелью создания и деятельности компании является извлечение прибыли. Предметом деятельности компании является:
ООО компания «Укрнефтеэкотехнологии» сертифицирует выпускаемую продукцию (товары, работы, услуги) в соответствии с действующим законодательством и несёт ответственность за реализацию продукции (товаров, работ, услуг), причиняющих вред потребителям. 1.2 Описание отделов компанииВ ООО компания «Укрнефтеэкотехнологии» имеется четыре отдела: - коммерческий отдел; - бухгалтерский отдел; - строительный отдел; - гараж. Наглядное изображение организационной структуры компании представлено на схеме 1.2.1.
Схема 1.2.1 Организационная структура предприятия 1.2.1 Коммерческий отделВ этом отделе работают три человека. В офисе отдела имеется 2 компьютера и факс. Компьютерами практически не пользуются, их используют для хранения информации. Коммерческий отдел ООО компания «Укрнефтеэкотехнологии» занимается покупкой строительных и отделочных материалов и продажей товаров и услуг. Так же в функции этого отдела включается поиск покупателей (клиентов) и продавцов (поиск осуществляется по принципу “дешевле купить – дороже продать”), установление контактов с покупателями (клиентами) и продавцами, ведётся поиск постоянных клиентов и оформляются некоторые документы: доверенность на получение груза и др (см. приложение). studfiles.net 1. ОБЩИЕ СВЕДЕНИЯ ОБ АЛГОРИТМАХВоснове любой компьютерной программы всегда лежит некоторый алгоритм, программа является изложением алгоритма на некотором языке, понятном вычислительной машине. Первым дошедшим до нас алгоритмом в его интуитивном понимании как конечной последовательности элементарных действий, решающих поставленную задачу, считается предложенный Евклидом в III веке до нашей эры алгоритм нахождения наибольшего общего делителя двух чисел. Отметим, что в течение длительного времени, вплоть до начала XX века, само слово «алгоритм» употреблялось в устойчивом сочетании «алгоритм Евклида». Для описания последовательности пошагового решения других математических задач чаще использовался термин «метод». Во всех сферах своей деятельности, в частности в сфере обработки информации, человек сталкивается с различными способами или методиками решения разнообразных задач. Они определяют порядок выполнения действий для получения желаемого результата. Можно трактовать это как первоначальное или интуитивное определение алгоритма. Таким образом, можно нестрого определить алгоритм как однозначно трактуемую процедуру решения задачи. Дополнительные требования о выполнении алгоритма за конечное время для любых входных данных приводят к следующему неформальному определению алгоритма: Алгоритм – это заданное на некотором языке конечное предписание, задающее конечную последовательность выполнимых и точно определенных элементарных операций для решения задачи, общее для класса возможных исходных данных. Пусть Dz – область (множество) исходных данных задачиZ, aR – множество возможных результатов, тогда можно говорить, что алгоритм осуществляет отображениеDz →R. Поскольку такое отображение может быть не полным, то вводятся следующие понятия: Алгоритм называется частичным алгоритмом, если результат может быть получен только для некоторых d Dz и полным алгоритмом, если алгоритм получает правильный результат для всехd Dz. Несмотря на усилия ученых, сегодня отсутствует одно исчерпывающе строгое определение понятия «алгоритм». Из разнообразных вариантов словесного определения алгоритма наиболее удачные, по мнению автора, принадлежат российским ученым А. Н. Колмогорову и А. А. Маркову: Определение по Колмогорову: алгоритм – это всякая система вычислений, выполняемых по строго определенным правилам, которая после какоголибо числа шагов заведомо приводит к решению поставленной задачи. Определение по Маркову: Алгоритм – это точное предписание, определяющее вычислительный процесс, идущий от варьируемых исходных данных к искомому результату.
1. ОБЩИЕ СВЕДЕНИЯ ОБ АЛГОРИТМАХ Отметим, что различные определения алгоритма, в явной или неявной форме, постулируют следующий ряд общих требований: •алгоритм должен содержать конечное количество элементарно выполнимых предписаний, т. е. удовлетворять требованию конечности записи; •алгоритм должен выполнять конечное количество шагов при решении задачи, т. е. удовлетворять требованию конечности действий; •алгоритм должен быть единым для всех допустимых исходных данных, т. е. удовлетворять требованию универсальности; •алгоритм должен приводить к правильному по отношению к поставленной задаче решению, т. е. удовлетворять требованию правильности. Неудобства словесных определений связаны с проблемой однозначной трактовки терминов. В таких определениях должен быть, хотя бы неявно, указан исполнитель действий или предписаний. Алгоритм вычисления производной для полинома фиксированной степени вполне ясен тем, кто знаком сосновами математического анализа, но для прочих он может оказаться совершенно непонятным. Это рассуждение заставляет указать так же вычислительные возможности исполнителя, а именно уточнить какие операции для него являются «элементарными». Другие трудности связаны с тем, что алгоритм заведомо существует, но его очень трудно описать в некоторой заранее заданной форме. Классический пример такой ситуации – алгоритм завязывания шнурков на ботинках «в бантик». Вы сможете дать только словесное описание этого алгоритма без использования иллюстраций ? Всвязи с этим формально строгие определения понятия алгоритма связаны с введением специальных математических конструкций – формальных алгоритмических систем или моделей вычислений, каковыми являются машина Поста, машина Тьюринга, рекурсивно-вычислимыефункции Черча, и постулированием тезиса об эквивалентности такого формализма и понятия «алгоритм». Несмотря на принципиально разные модели вычислений, использующиеся для определения термина «алгоритм», интересным результатом является формулировка гипотез о эквивалентности этих формальных определений в смысле их равномощности. 1.1. Свойстваалгоритмов В качестве содержательных свойств, характеризующих алгоритм, А. А. Марков отмечает следующие: 1.Определенность. Алгоритм должен быть точным, недвусмысленным ипонятным исполнителю. Исполнитель, выполняя алгоритм, должен однозначно понимать предписание и знать, что надлежит делать на данном шаге вычислительного процесса и каков будет следующий шаг. Определенность не всегда означает детерминированность, т. е. когда на каждом шаге вычис-
1. ОБЩИЕ СВЕДЕНИЯ ОБ АЛГОРИТМАХ 1.1. Свойства алгоритмов лительного процесса исполнитель должен исполнить единственное предписываемое действие и результат этого действия определен. Хотя в дальнейшем будем предполагать, что алгоритм детерминирован, однако не стоит забывать, что могут существовать и недетерминированные алгоритмы, особенно при наличии коллектива исполнителей (что характерно для параллельного программирования). При недетерминированности на некоторых шагах вычислительного процесса возможен не определяемый алгоритмом выбор из конечного фиксированного набора действий, но этот набор должен быть точно определен – определенность есть неотъемлемое свойство алгоритма. 2.Массовость. Алгоритм предлагает всегда решение некоторой массовой проблемы, его исходные данные варьируются. Существует некоторое (заведомо не пустое и не единичное) множество наборов исходных данных, определяемое решаемой проблемой, для которых алгоритм обеспечивает получение искомого результата. Не для любой массовой проблемы существует решающий ее алгоритм – втеории алгоритмов для ряда массовых проблем доказана их неразрешимость, т. е. отсутствие алгоритма, получающего искомый результат для множества наборов исходных данных, возможного для этой проблемы. Близкой для нас неразрешимой массовой проблемой является установление эквивалентности двух произвольных программ – доказано, что не существует алгоритма, который для двух произвольных программ устанавливал бы, всегда ли они для одинакового набора исходных данных получают одинаковый результат. Вместе с тем нас должен утешать тот факт, что большинство реальных проблем в их надлежащей постановке вполне допускают наличие алгоритма их решения. 3.Результативность. Обычно алгоритм должен обеспечивать завершение своего выполнения ожидаемым результатом вычислительного процесса в конечное (и хотелось бы, приемлемое) время, разумеется, при надлежащих допустимых исходных данных. Допустимость исходных данных следует из существа решаемой проблемы: так, если все исходные данные должны быть положительны, то нельзя требовать от алгоритма разумной реакции на то, что одно из данных ошибочно оказалось отрицательным. Вместе с тем обычно стараются обезопасить алгоритм предварительной проверкой исходных данных на допустимость и при их недопустимости явно сообщать пользователю об этом. В пользовательском программировании все реализуемые алгоритмы носят такой завершающийся характер. Однако результатом алгоритма может быть и поддержание некоторого постоянного процесса: процесса управления некоторым устройством, процесса контроля его состояния, наконец, процесса операционной системы, управляющей функционированием компьютера. Результатами таких алгоритмов являются сигналы и сообщения, посылаемые пользователю или устройству, и в этом их результативность. Такие алгоритмы, как правило, находятся за рамками пользовательского программирования.
1. ОБЩИЕ СВЕДЕНИЯ ОБ АЛГОРИТМАХ 1.2. Примерыалгоритмов Классической массовой проблемой, известной с древности, является нахождение наибольшего общего делителя (НОД) двух натуральных чисел. Алгоритм, решающий эту проблему, может быть следующим. Дана пара произвольных чисел, назовем их т иn. Предписание, представляющее алгоритм, будем описывать на естественном языке в виде последовательности нумеруемых шагов: Шаг 1. Возьмем в качестве р значение наименьшего изm иn. Шаг 2. Возьмем в качествеt значение 1. Шаг 3. Если р = 1, то перейдём к шагу 5, иначе к шагу 4. Шаг 4. Задавая в качестве i последовательно все целые значения от 2 дор (по возрастанию), повторяем Шаг 4.1. Шаг 4. 1. Если остаток (m /i)= 0 и остаток (n /i) = 0, то возьмем в качествеt значениеi. Шаг 5. Завершаем алгоритм с результатом НОД = t. С точки зрения исполнителя-человекаэто предписание точно и однозначно. Шаги исполняются последовательно, причем шаг 4 является повторением определенного числа раз шага 4. 1 каждый раз со следующим значениемi. Будем считать, что мы знаем, как находить остаток от деления, т. е. определенность здесь присутствует. То, что приведенное предписание обладает массовостью, тоже очевидно. Существует множество пар чисел, для которых предписание дает результат. Ясно, что вычислительный процесс будет нормально исполняться для любых конечных значений т ип, больших нуля. Именно такие пары и дают нам допустимые для решаемой проблемы значения исходных данных. В данном случае результативность совпадает с завершаемостью. Завершаемость вычислительного процесса следует из того, что т ип конечны, и, следовательно, число повторений шага 4. 1 тоже конечно, остальные же шаги выполняются однократно. Число исполненных шагов зависит прежде всего от числа повторений шага 4. 1, а он будет повторяться (min(m,п) – 1) раз. То, что результатом будет действительно наибольший общий делитель, очевидно из того, что если одно из значений пары есть 1, то полученным НОД будет 1; если ни одно из чисел от 2 до наименьшего из пары не является одновременно делителем ип, ит, то полученный НОД тоже 1, а если среди этих чисел есть делители ип, ит, то значениемt после шага 4 будет наибольшее такое число. Именно оно будет последним и на шаге 4. 1 будет взято в качествеt. Итак, приведенное предписание обладает всеми упомянутыми свойствами алгоритма. Заметим, что здесь мы применили подход «в лоб» – перебрали все значения, которые в принципе могут быть делителями m ип, и проверили, может ли каждое быть общим делителем, а найдя больший, чем ранее найден-
1. ОБЩИЕ СВЕДЕНИЯ ОБ АЛГОРИТМАХ 1.2. Примеры алгоритмов ный, делитель, заменили им ранее найденный. Такие, так называемые переборные, алгоритмы (перебираются все потенциально возможные значения решений) мы вынуждены применять, если у нас нет никаких соображений, как сократить число перебираемых значений. Зачастую такие соображения у нас могут быть. Так, для данной проблемы давно известно, что НОД (m,n) = НОД (остаток (n /m),m) где m – наименьшее число пары. Таким образом, нахождение НОД для пары чисел можно свести к нахождению НОД для такой пары, в которой прежнее наименьшее становится наибольшим. Перебор уже становится перебором пар, определяемых приведенным выше соотношением, что сокращает его по отношению к уже приведенному алгоритму. Алгоритм (так называемый алгоритм Эвклида) выглядит следующим образом: Шаг 1. Пока m не равно 0, выполнять шаги 1. 1 – 1. 4, иначе перейти к шагу 2. Шаг 1. 1. Возьмем значение t как остаток (n /m). Шаг 1. 2. Возьмемn как значениеm. Шаг 1. 3. Возьмем m как значениеt. Шаг 1. 4. Вернемся к шагу 1. Шаг 2. Завершаем алгоритм с НОД = n. Приведенное предписание действительно является алгоритмом, так как оно обладает определенностью (как и предыдущее предписание), массовостью (о допустимых значениях мы поговорим далее) и результативностью (повторения шагов 1. 1 – 1. 4 создают пары с уменьшающимися неотрицательными значениями и, значит, рано или поздно m станет равным нулю). Что касается допустимых значений, то ясно, чтоm ип должны быть больше нуля (впрочем, они могут быть и равны нулю: еслит = 0, то за НОД возьмется значениеп). На первый взгляд, из предыдущих рассуждений следует, что от должно быть не большеп. Однако если проанализировать исполнение алгоритма, то увидим, что еслит >п, то при первом же исполнении шагов 1. 1 – 1. 4 значения переставятся: большее станет значениемп, а меньшее – значениемm, что и нужно для дальнейшего исполнения алгоритма. Число шагов алгоритма здесь оценить гораздо труднее, чем в предыдущем случае – оно существенно зависит от свойств т ип по отношению друг к другу. Средняя ожидаемая оценка числа повторений шагов 1. 1 – 1. 4 равна приблизительно (12 *ln 2/ π2) * (ln m). Видно, что это значительно меньше, чем в предыдущем случае, и привлеченные соображения позволили существенно уменьшить перебор. Важно, что в последнем примере более явно, чем в предыдущем, видна изменяемость данных – исходная пара, идентифицируемая обозначениями т ип, меняется и перестраивается, сохраняя введенные обозначения. Видим, что приходится вводить объекты с фиксированным обозначением и меняющимся значением – то, что в языках программирования называется переменной.
studfiles.net Общие сведения об операционных системах.Санкт-Петербургский Университет Телекомунникаций им. проф. Бонч-Бруевича. Курс лекций по дисциплине Операционные системы. Выполнила: студентка группы СП-02 Казаченко Ю. В. Лектор: Болтов Юрий Федорович Проверил: Болтов Юрий Федорович Санкт-Петербург 2002г. ЭВМ первого поколения ( 40 и начало 50 годов) практически не имели ОС. Программы писались непосредственно в машинных кодах, что, в частности, требовало поддержки доступа программы к памяти на этапе ее написания. Поэтому разработка программного продукта наталкивалась на ряд сложностей Для ЭВМ второго поколения были созданы простейшие ОС, которые отчасти позволили "разделить" среду разработки программ и аппаратные средства. Однако, достигнутого на этом этапе "уровня абстрагирования" было явно не достаточно для разработки и сопровождения относительно сложных задач. По структуре и функциям эти ОС существенно отличались от современных. Современные контуры ОС стали приобретать в конце 60 годов, когда появились достаточно мощные ЭВМ третьего поколения. Становление ОС на этом этапе ниже будет рассмотрено более подробно. Позднее (через полтора десятка лет) ЭВМ третьего поколения стали вытесняться более мобильными ЭВМ 4-ого поколения. К их числу, в частности, относятся самые распространенные в настоящее время персональные компьютеры семейства IBM PC. При разработке ОС для этих компьютеров были учтены не только опыт, но и горькие уроки, полученные в результате эксплуатации первых операционных систем. и требовала хорошего знания аппаратных средств.
Современные ОС - широко распространенные системы - во многом похожи друг на друга. Прежде всего это определяется требованием переносимости программного обеспечения. Именно для обеспечения этой переносимости был принят POSIX (Portable OS Interface based on uniX) - стандарт, определяющий минимальные функции по управлению файлами, межпроцессному взаимодействию и т.д., которые должна уметь выполнять система. Кроме того, за четыре с лишним десятилетия, прошедших с момента разработки первых ОС, сообщество программистов достигло определенного понимания того, что: при разработке ОС возникает много стандартных проблем и вопросов; для большинства из этих проблем и вопросов существует набор стандартных решений; некоторые из этих решений намного лучше, чем все альтернативные. По современным представлениям, ОС должна уметь делать следующее:
Более развитые ОС предоставляют также следующие возможности: 1.Параллельное (точнее, псевдопараллельное, если машина имеет только один процессор) исполнение нескольких задач. 2.Распределение ресурсов компьютера между задачами. 3.Организация взаимодействия задач друг с другом. 4.Взаимодействие пользовательских программ с нестандартными внешними устройствами.
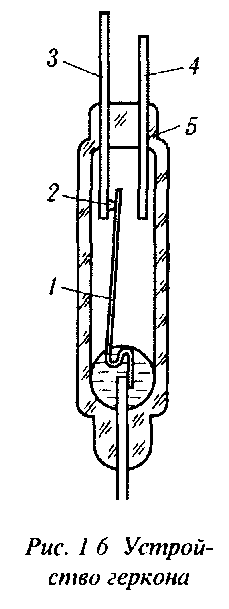
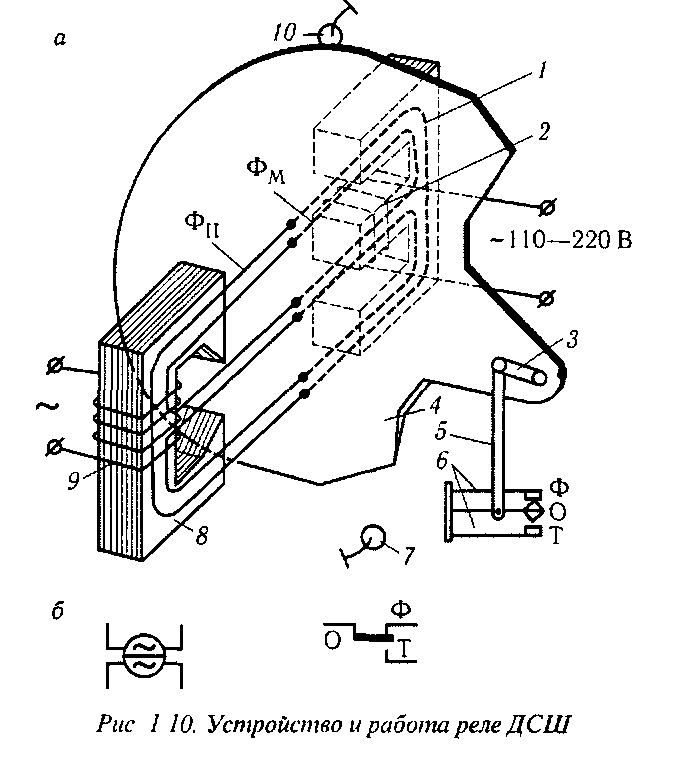
studfiles.net Общие сведения об электронных приборах1.1. КлассификацияЭлектронным прибором (ЭП) называют устройство, в котором в результате взаимодействия свободных или связанных носителей заряда с электрическим, магнитным и переменным электромагнитным полем обеспечивается преобразование информационного сигнала или преобразование вида энергии. Основными признаками классификации разнообразных по принципу действия, назначению, технологии изготовления, свойствам и параметрам можно считать: вид преобразования сигнала; вид рабочей среды и тип носителей заряда; структуру (устройство) и число электродов; способ управления. По виду преобразования сигнала все ЭП можно разбить на две большие группы. К первой группе относятся ЭП, в которых используется преобразование одного вида энергии в другой. В эту группу входят электросветовые ЭП (преобразование типа электрический сигнал в световой), фотоэлектронные приборы (световой сигнал в электрический), электромеханические (электрический сигнал в механический), механоэлектрические ЭП (механический сигнал в электрический), оптопары (электрический сигнал в световой и затем снова в электрический)и др. Ко второй группе обычно относятся электропреобразовательные приборы, в которых изменяются параметры электрического сигнала (например, амплитуда, фаза, частота и др.). По виду рабочей среды и типу носителей заряда различают следующие классы электронных приборов: электровакуумные (вакуум, электроны), газоразрядные (разреженный газ, электроны и ионы), полупроводниковые (полупроводник, электроны и дырки), хемотронные (жидкость, ионы и электроны). Электроды электронного прибора – это элементы его конструкции, которые служат для формирования рабочего пространства прибора и связи его с внешними цепями. Число электродов и их потенциалы определяют физические процессы в приборе. Наиболее наглядно это в электронных лампах: двухэлектродные (диоды), трехэлектродные (триоды), четырехэлектродные (тетроды) и пятиэлектродные (пентоды). 1.2. Режимы, характеристики и параметры электронных приборовСовокупность условий, определяющих состояние или работу электронного прибора, принято называть режимом электронного прибора, а любую величину, характеризующую этот режим (к примеру, ток или напряжение), – параметрами режима. Говорят об усилительных, импульсных, частотных, шумовых, температурных и механических свойствах, о надежности и т.п. Количественные сведения об этих свойствах называют параметрами прибора. К ним, например, относят коэффициенты передачи токов, характеристические частоты, коэффициент шума, интенсивность отказов, ударную стойкость и др. Вначале остановимся на понятиях статического и динамического режимов приборов. Статическим называют режим, когда прибор работает при постоянных («статических») напряжениях на электродах. В этом режиме токи в цепях электродов не изменяются во времени и распределения зарядов и токов в приборе также постоянны во времени. Другими словами, в статическом режиме все параметры режима не изменяются во времени. Однако, если хотя бы один из параметров режима, например напряжение на каком-то электроде, изменяется во времени, режим называется динамическим. В динамическом режиме поведение прибора существенно зависит от скорости или частоты изменения воздействия (например, напряжения). У большинства приборов эта зависимость объясняется инерционностью физических процессов в приборе, например конечным временем пролета носителей заряда через рабочее пространство или конечным временем жизни носителей. Конечность времени пролета приводит к тому, что мгновенное значение тока электрода, к которому движутся носители, в выбранный момент времени будет определяться не только значением напряжения на электроде в этот момент, но, естественно, и предысторией, т.е. всеми значениями напряжения от момента начала движения в приборе до прихода носителя заряда к рассматриваемому электроду. Следовательно, связь мгновенных значений тока и напряжения в динамическом режиме должна отличаться от связи постоянных значений тока и напряжения в статическом режиме. Однако если время пролета значительно меньше периода изменения переменного напряжения, то это .отличие во взаимосвязи будет несущественным, т.е. связь мгновенных значений будет практически такой же, как постоянных величин в статическом режиме. Указанная разновидность динамического режима называется квазистатическим режимом («квази» – означает «как бы» или «как будто»). Обычно динамический режим получается в результате внешнего воздействия, например входного сигнала. Входной сигнал может быть синусоидальным или импульсным. Малым называют такой сигнал, при котором наблюдается линейная связь (прямая пропорциональность) между амплитудами выходного и входного сигналов. studfiles.net Общие сведения об элементах систем⇐ ПредыдущаяСтр 3 из 51Следующая ⇒Любая система регулирования движения поездов состоит из отдельных элементов, связанных между собой. В этих системах используют в основном электрические элементы, в которых одна из величин (входная или выходная) или обе являются электрическими (ток, напряжение). В дальнейшем будем рассматривать только электрические элементы. В зависимости от выполняемых функций в системах регулирования движения поездов используются следующие элементы: датчики, электрические фильтры, реле, трансмиттеры, стабилизаторы, усилители, дешифраторы, трансформаторы, двигатели, распределители и др. Электрический датчик предназначен для измерения или преобразования неэлектрических величин в электрические и осуществляет качественное преобразование воздействия. Примером таких датчиков могут служить магнитная педаль ПБМ-56, с помощью которой контролируется прибытие поезда на станцию при полуавтоматической блокировке, а также в других системах регулирования движения, и рельсовая цепь, с помощью которой контролируется наличие или отсутствие подвижной единицы на изолированном путевом участке. Электрический фильтр пропускает электрические сигналы (напряжение, ток) одних частот и препятствует пропуску сигналов других частот; он осуществляет количественное преобразование воздействия, полученного от предыдущего элемента, и передачу его на последующий элемент. Реле преобразует электрическую величину (ток, напряжение) в механическую (перемещение якоря), которая снова преобразуется в электрическую величину посредством замыкания или размыкания электрического контакта. Трансмиттер вырабатывает кодовые сигналы, используемые в работе систем регулирования движения поездов. Стабилизатор поддерживает постоянство выходной величины при изменении входной величины в известных пределах. Усилитель служит для повышения амплитуды электрических сигналов и осуществляет количественное преобразование воздействия. Дешифратор расшифровывает принятый код и передает воздействие на последующий элемент, осуществляя качественное его преобразование. Трансформатор осуществляет количественное преобразование напряжения. Двигатель преобразует электрическую энергию в механическое движение с целью воздействия на объект автоматического управления или регулирования. Распределитель обеспечивает распределение как во времени, так и по отдельным электрическим цепям поданную на его вход серию импульсов. Таким образом, элементы являются составной частью систем регулирования движения, которые выполняют ответственные функции по регулированию и обеспечению безопасности движения поездов. Поэтому к элементам систем регулирования движения предъявляется ряд требований. Элементы должны быть простыми по конструкции и принципу действия, обладать высокой надежностью действия и защищенностью от помех, иметь малые габаритные размеры и массу, легко заменяться в системе и быть доступными для ремонта и профилактических осмотров. При отказе работы элемента должны полностью исключаться в системе положения, опасные для движения поездов. Исходя из конкретных условий эксплуатации, к элементам может предъявляться и ряд дополнительных требований. Например, к элементам, которые размещаются на локомотивах и в релейных шкафах на пути, предъявляются требования по виброустойчивости, защите от атмосферных воздействий и пыли. Общие сведения о реле В системах регулирования движения поездов применяются реле, с помощью которых производят различные переключения электрических цепей для осуществления схемных зависимостей между состоянием пути, положением стрелок и показанием сигнала, необходимых для обеспечения безопасности движения поездов. Реле представляет собой элемент, в котором при плавном изменении входной величины (тока, напряжения) происходит скачкообразное изменение выходной величины (перемещение якоря у контактных реле, изменение внутреннего электрического или магнитного сопротивления у бесконтактных реле). Большое распространение получили электрические контактные реле, в частности, электромагнитные, у которых скачкообразное изменение тока во входной цепи достигается физическим ее разрывом. Такие реле просты и надежны в работе и обеспечивают независимое переключение большого числа выходных цепей. Реле имеет два устойчивых состояния: рабочее (под током), при котором реле возбуждено и якорь его притянут, т.е. замкнуты верхние (фронтовые) контакты; нерабочее (без тока), при котором реле обесточено и якорь отпущен, т.е. замкнуты нижние (тыловые) контакты. По принципу действия реле СЦБ подразделяются на электромагнитные, у которых при протекании электрического тока по обмотке возникает магнитное поле, которое действует на подвижный якорь, притягивая его к сердечнику и переключая связанные с якорем контакты, и индукционные, которые работают под действием переменного магнитного поля, создаваемого одним элементом реле, с током, индуцированным в подвижном секторе магнитным полем другого элемента.
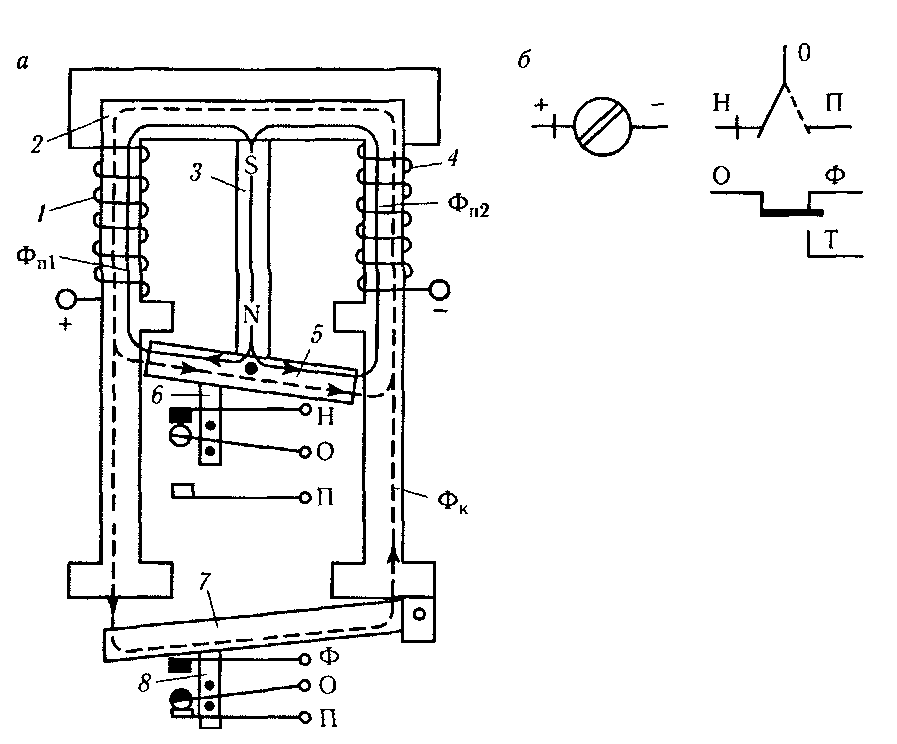
Рис. 1.2. Устройство реле
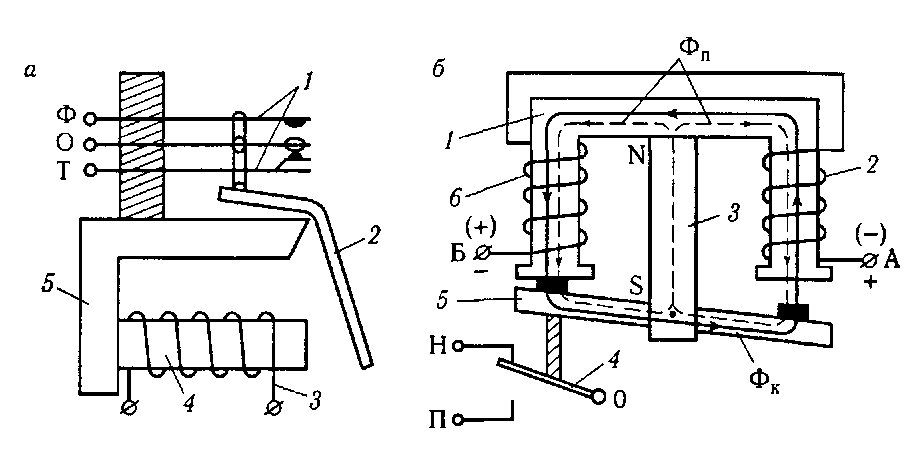
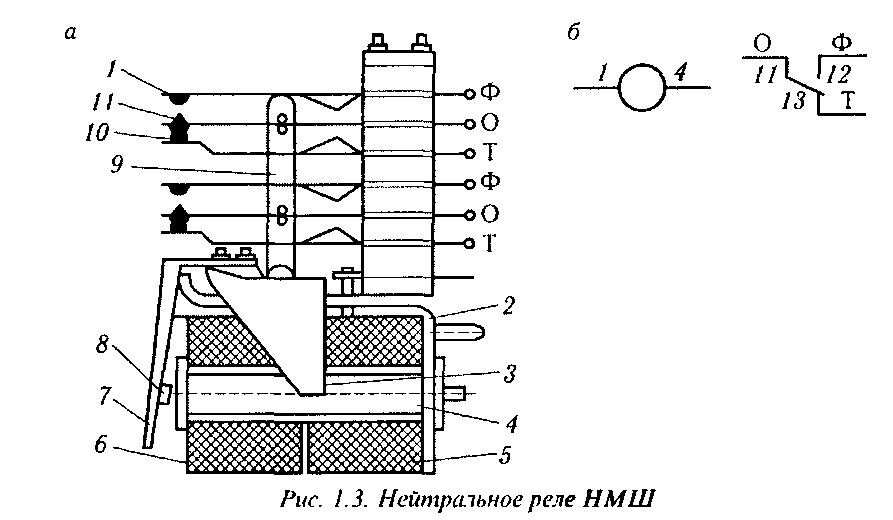
В зависимости or рода питающего тока реле могут быть постоянного, переменного и постоянно-переменного тока. Электромагнитное реле постоянного тока (рис. 1.2, а) состоит из катушки 3, надетой на сердечник 4, ярма 5, подвижного якоря 2 и связанных с ним контактов 1. Катушка, или обмотка реле служит для создания магнитного потока, а сердечник — для его усиления. Ярмо предназначено для получения непрерывного магнитопровода, подвижной частью которого является якорь. При отсутствии тока в катушке реле якорь отпущен, замкнут нижний (тыловой) контакт О—Т. При пропускании тока в катушке создается магнитный поток, сердечник намагничивается и притягивает к себе якорь, в результате чего размыкается контакт О—Т и замыкается верхний (фронтовой) контакт О—Ф. У такого реле якорь притягивается при прохождении тока по катушке в любом направлении, поэтому это реле называют нейтральным. Реле, у которого якорь переключается в зависимости от направления прохождения тока в катушке, называется поляризованным. Поляризованное реле (рис. 1.2, 6) состоит из сердечника 1, на который надеты катушки 2 и 6, соединенные последовательно, из постоянного магнита 3, поляризованного якоря 5 и связанных с ним контактов 4. Постоянный магнит обеспечивает переключение якоря при изменении направления тока в обмотке реле и удерживает якорь в заданном положении при отсутствии тока в обмотке. Для пояснения работы поляризованных реле применяют два термина: прямая и обратная полярность постоянного тока. У каждого реле к определенному (основному) выводу катушки подключается плюсовой полюс, а к другому выводу — минусовой полюс источника питания. При таком подключении полюсов источника питания принято считать, что ток в катушке будет проходить всегда от плюсового вывода к минусовому. Такое направление тока в катушке называется прямой полярностью тока, а направление тока в катушке реле при подключении к основному ее выводу минусового, а к другому — плюсового полюса источника питания называется обратной полярностью тока. Например, если на вывод А катушки (см. рис. 1.2, б) подается плюсовой полюс источника питания (+), а на вывод Б — минусовой (-), то направление тока в катушке от вывода А к выводу Б считается прямой полярностью тока. Если же к выводу Б катушки подключен плюсовой полюс источника питания (+), а к выводу А — минусовой (—), то направление тока, протекающего от вывода Б к выводу А, считается обратной полярностью тока. При отсутствии тока в катушках реле якорь под действием потока Фп постоянного магнита (показан штриховой линией) удерживается в том положении, в котором он находился в момент выключения тока. На рис 1.2, б поляризованный якорь занимает левое положение, которое соответствует прохождению в катушках тока прямой полярности, и замыкает нормальный контакт О—Н. При прохождении тока обратной полярности в катушках создается магнитный поток Фк (показан сплошной линией), который имеет направление от вывода Б к выводу А, и под полюсными наконечниками сердечника взаимодействует с магнитным потоком Фп постоянного магнита (показан штриховой линией). В левом зазоре сердечника магнитные потоки направлены навстречу друг другу, т.е. Фк—Фп, в правом — в одну сторону, т.е. Фь+Фп. Якорь под действием более сильного магнитного поля переключается вправо, замыкая переведенный контакт О—П. При прохождении тока прямой полярности происходит изменение направления магнитного потока Фк, отчего в правом зазоре магнитный поток Фп вычитается из Фк, а в левом Фп и Фк складываются, как показано на рис. 1.2, б. Вследствие увеличения магнитного поля у левого сердечника якорь переключается к левому сердечнику, замыкая нормальный контакт О—Н. Включение реле характеризуется напряжением (током) срабатывания, при котором происходит притяжение якоря и замыкание фронтовых контактов. Выключение реле характеризуется напряжением (током) отпускания, при котором происходит отпускание якоря и замыкание тыловых контактов. К конструкции реле предъявляют высокие требования надежности, долговечности и четкости работы, так как от правильной работы реле зависят безопасность движения поездов и бесперебойное действие систем регулирования движения. По надежности действия реле бывают первого (I) и низшего классов надежности. Класс надежности определяется сочетанием следующих основных факторов: наличием гарантии возврата якоря под действием собственного веса при выключении тока в обмотке реле, степенью несвариваемости фронтовых контактов, состоянием контактной системы — открытая или закрытая. К реле I класса надежности относятся такие, у которых возврат якоря при выключении тока в обмотке обеспечивается с максимальной гарантией под действием веса якоря, а для контактных поверхностей применяются несвариваемые материалы, контактная же система закрытая. Такие реле применяются во всех ответственных схемах, обеспечивающих безопасность движения, без дополнительного схемного контроля отпускания якоря реле. К реле низших классов надежности относятся такие, у которых отпускание якоря гарантируется в меньшей степени и происходит под действием веса якоря и реакции контактных пружин, и у которых возможно сваривание контактов. Эти реле используют в схемах, непосредственно не связанных с обеспечением безопасности движения поездов (в схемах контроля и индикации). Если такие реле применяют в ответственных цепях, то обязателен схемный контроль притяжения и отпускания якоря реле. По числу рабочих позиций реле делятся на двух- и трехпозиционные. По числу контактных групп реле бывают одноконтактные (с одной контактной группой) и многоконтактные (с двух-, четырех*, шести- и восьмиконтактными группами), а также одно-, двух- и многообмоточные. По времени срабатывания реле подразделяют на: быстродействующие — с временем срабатывания на притяжение и отпускание якоря до 0,03 с; нормальнодействующие — с временем срабатывания до 0,2 с; медленнодействующие — с временем срабатывания до 1,5 с; временные — с временем срабатывания свыше 1,5 с. По мощности, необходимой для срабатывания реле (притяжение якоря реле), реле подразделяют на маломощные, у которых мощность срабатывания 1...3 Вт; средней мощности 3...10 Вт; мощные — более 10 Вт. В эксплуатируемых системах регулирования движения используются в основном штепсельные реле, которые отличаются от реле с контактно-болтовым соединением конструкцией и способом включения в схемы. Реле СЦБ имеют определенное условное обозначение (маркировку), состоящее из букв и цифр, занимающих определенное место в обозначении. Первая буква или сочетание двух первых букв в обозначении указывает на физический принцип действия реле: Н — нейтральное, П — поляризованное, К — комбинированное, СК — самоудерживающее комбинированное, И — импульсное, ДС — двухэлементное секторное (индукционное реле переменного тока). Буква М, стоящая на втором месте в условном обозначении штепсельных реле, указывает на малогабаритное исполнение реле. У реле, предназначенных для использования в автоблокировке, на первом месте стоят две буквы АН: первая буква А указывает на то, что реле автоблокировочное малогабаритное, а вторая буква — на принцип действия реле. У пусковых реле в условном обозначении имеется буква П, а у реле с выпрямителем — буква В. Штепсельное соединение реле с другими приборами обозначается буквой Ш. В обозначении медленнодействующих реле присутствует дополнительная буква: М — обозначает реле с замедлением на отпускание якоря с помощью медной гильзы, Т — реле с замедлением на срабатывание с помощью термоэлемента. После указанных букв ставится цифра, характеризующая число контактных групп (НМШ1, АНШ2, НМПШЗ и т.д.). Второе число, отделенное дефисом, обозначает сопротивление обмотки реле постоянному току в омах (НМШМ2—640, НМПШ2—400 и т.д.). У некоторых типов реле эта система обозначений не выдержи^ вается. Так, в обозначении аварийных и огневых реле (АСШ, ОМШ) первая буква характеризует назначение реле. Наряду с электрическими контактными реле все большее приме-1 нение получают полупроводниковые приборы релейного действия (бесконтактные реле) и микроэлектронные приборы, использующие интегральные микросхемы и микропроцессорную технику. Реле постоянного тока Реле постоянного тока по принципу действия являются электромагнитными, а по конструкции подразделяются на следующие типы: Нейтральные реле НМШ, НШ, АНШ. Это двухпозиционные реле с одним якорем, который притягивается к полюсам катушек при прохождении через них постоянного тока в любом направлении, т.е. реле нейтральны к полярности постоянного тока. Все эти реле относятся к 1 классу надежности и могут быть нормально- и медленнодействующими. По принципу действия относятся к электромагнитным. Нейтральное малогабаритное штепсельное реле типа НМШ (рис. 1.3, а) состоит из сердечника 4 с надетыми на него катушками 5 и 6, Г-образного ярма 2 и якоря 7 с противовесом 3. Бронзовый упор
8 на якоре исключает его залипание,так как он препятствует касанию якоря в притянутом положении к полюсу сердечника 4. Якорь двумя тягами 9 управляет контактной системой. Фронтовые контакты Ф-1 изготавливают из угля с серебряным наполнением, а общие О 11 и тыловые Т 10 — из сереб ра. Такое сочетание материалов исключает сваривание фронтовых контактов с общими при пропускании по ним тока значительной величины. Условное обозначение реле и его контактов, а также нумерация контактов показаны на рис. 1.3, б. Реле РЭЛ (рис. 1.4) имеет две независимые обмотки 2, каждая из которых состоит из двух катушек, расположенных на разных сердечниках. Магнитная система реле разветвленная, содержит якорь 5, ярмо / и два сердечника 11, на каждом из которых расположено по две катушки. Якорь закреплен на ярме при помощи скобы 6 и может свободно поворачиваться при работе реле. На якоре прикреплена бронзовая пластина 4, которая обеспечивает зазор между якорем и обоими сердечниками. Для утяжеления якоря имеются два груза 3, которые закреплены на якоре изгибом планки 7. Контактная система содержит восемь независимых контактов. Каждый переключающий контакт состоит из фронтового 8, подвижного 9 и тылового 10 контактов. Контактная система выполнена в виде отдельного узла, закрепленного на ярме. Контакты размещены в один ряд. Реле закрыто прозрачным колпаком и запломбировано.
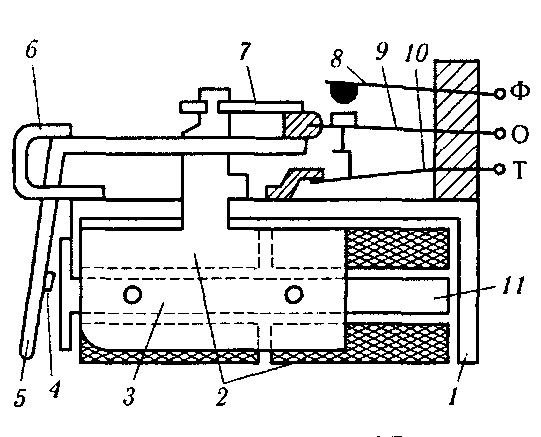
Поляризованное реле ИМШ. Оно двухпозиционное, имеет в магнитной системе постоянный магнит, под действием которого якорь переключается из одного положения в другое в зависимости от направления тока в обмотке реле. Реле ИМШ быстродействующее и не относится к реле 1 класса надежности. Оно предназначено для импульсной работы, их магнитная система может выполняться с нейтральной регулировкой якоря и с регулировкой на преобладание, т.е. с возвращением его в исходное положение при выключении тока. Поляризованные импульсные реле нашли широкое применение в устройствах СЦБ в качестве путевых реле в перегонных рельсовых цепях, так как они обладают высокой чувствительностью и большой скоростью срабатывания от импульсов тока. Импульсные реле в цепях постоянного тока благодаря регулировке положения якоря в магнитной системе могут работать от токов одного направления или токов разных направлений, т.е. обладают избирательностью к направлению постоянного тока. В устройствах СЦБ наибольшее распространение получили импульсные малогабаритные штепсельные реле типа ИМШ. Импульсное малогабаритное реле ИМШ. Оно состоит (рис. 1.5, а) из постоянного магнита 2, катушки 3, внутри которой расположен легкий якорь, укрепленный снизу на металлическом основании 8 с подвижными контактами 6, магнитопровод 4 с четырьмя полюсными наконечниками 1 в виде винтов. Детали магнитной системы смонтированы на корпусе 7 и закрыты колпаком с ручкой. Контактная система состоит из контактов неподвижных 5 и подвижных б. Переключение якоря и контактов происходит при прохождении через катушку импульса тока. Условное обозначение импульсного реле
л его контактов показаны на рис. 1.5, б, где плюсовой вывод обмотки реле и положение контакта Н, замыкающегося при прохождении тока прямой полярности, изображены вертикальной чертой. Действие импульсного реле аналогично поляризованному, однако при удалении от нейтральной линии верхнего и нижнего левого полюсных наконечников получается регулировка реле с преобладанием влево, а при удалении от нейтральной линии верхнего левого и правого нижнего полюсных наконечников — с преобладанием вправо. В этом случае импульсное реле будет работать только от импульсов определенной полярности и не срабатывать от импульсов другой полярности. Настройка реле на работу с магнитным преобладанием якоря производится посредством смещения винтов полюсных наконечников 1 от нейтральной линии. Это свойство импульсного поляризованного реле используется в импульсных рельсовых цепях постоянного тока для защиты от ложного срабатывания при замыкании изолирующих стыков в смежных рельсовых цепях. В качестве приемника импульсов переменного тока еще применяется импульсное малогабаритное штепсельное реле ИМВШ-110. Отличительной особенностью этого реле по сравнению с реле ИМШ является то, что внутри И М ВШ-110 на корпусе закреплена панель с выпрямителем, состоящим из четырех кремниевых диодов. Кроме этого, свойство избирательности к направлению тока импульсного поляризованного реле у реле ИМВШ не используется, так как переменный ток поступает в обмотку через выпрямитель, т.е. всегда в одном направлении. В настоящее время вместо реле ИМВШ распространение получило реле ИВГ (импульсное с выпрямительной приставкой герконовое). Оно имеет нейтральную систему. На полюсном наконечнике сердечника установлен ртутный магнитоуправляемый геркон (герметизированный контакт). Геркон (рис. 1.6) состоит из стеклянного баллона 5, по концам которого впаяны неподвижные 4,3 и подвижная 1 плоские контактные пружины.
При воздействии магнитного поля подвижная контактная пружина 1 перемещается, размыкая тыловой и замыкая фронтовой контакты. На контактную поверхность 2 при работе геркона по капиллярам подвижной контактной пружины 1 постоянно поступает ртуть. Смачивание контактов ртутью обеспечивает их низкое и стабильное переходное сопротивление. Контактные пружины геркона герметизированы и не подвергаются окислению и загрязнению, поэтому геркон обладает высокой надежностью. Число срабатываний герконового реле в десятки и даже сотни раз больше, чем у обычного электромагнитного реле. Комбинированные реле КМШ, КШ. Они трехпозиционные с нейтрально поляризованной системой, имеющей один нейтральный и один поляризованный якорь. Нейтральный якорь этих реле устроен и работает так же, как и у нейтральных реле, т.е. его переключение не зависит от полярности постоянного тока в обмотке реле. Переключение поляризованного якоря из одного положения в другое у таких реле происходит в зависимости от направления тока в обмотке реле. При возбуждении комбинированных реле первым срабатывает поляризованный якорь, а затем притягивается нейтральный якорь, а при смене полярности тока в обмотке реле происходит кратковременное отпускание якоря. Комбинированные реле по времени срабатывания относятся к нормально действующим. Комбинированное малогабаритное реле типа КМШ. Оно состоит (рис. 1.7, а) из двух катушек 1 и 4, надетых на сердечники 2, нейтрального якоря 7 и постоянного магнита 3, с которым связан поляризованный якорь 5. Нейтральный и поляризованный якоря с помощью тяг 6 и 8 переключают контакты. Условные обозначения комбинированного реле и его контактов показаны на рис. 1.7, б. Если ток в катушках реле отсутствует, то поляризованный якорь занимает всегда одно из крайних положений, а именно то, в котором он находился в момент выключения тока; нейтральный якорь при этом отпущен. Магнитный поток постоянного магнита разветвляется на два параллельных магнитных потока Фп1 и Фп,. Так как поляризованный якорь находится в крайнем левом положении, то благодаря меньшему воздушному зазору слева магнитный поток Фп1 в этом сердечнике получает приращение Фп и за счет этого превышает магнитный поток Фп2 в правом сердечнике. Из-за разности
Рис 1 7 Комбинированное реле КМШ
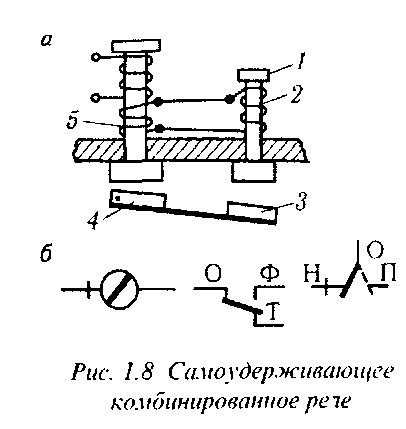
этих потоков якорь удерживается у левого сердечника. При пропускании тока через катушки в сердечниках возникает магнитный поток Фк, который разветвляется по двум параллельным ветвям: через нейтральный и поляризованный якоря. Магнитный поток Фк в правом сердечнике совпадает по направлению с магнитным потоком Фп„ а в левом сердечнике направлен навстречу магнитному потоку Фп1, поэтому в правом сердечнике магнитный поток усиливается (Фп2 + Фк), а в левом — ослабляется (Фп1 — Фк). Вследствие этого поляризованный якорь переключается в правое положение, замыкая общие контакты с переведенными. Затем под действием части потока Фк, проходящего через нейтральный якорь, он притягивается, замыкая общие контакты с фронтовыми. Изменение направления тока в катушках реле вызывает изменение направления магнитного потока Фк, что приводит к усилению магнитного потока в левом сердечнике и ослаблению в правом, в результате чего поляризованный якорь притянется к левому сердечнику, а нейтральный якорь будет кратковременно отпадать, а затем вновь притягиваться из-за перемагничивания сердечников. Самоудерживающее комбинированное реле СКШ, СКПШ. Оно трехпозиционное с магнитной системой, аналогичной магнитной системе комбинированного реле, но дополненной самоудерживающей магнитной системой для удержания нейтрального якоря в притянутом положении в момент изменения направления тока в основных катушках реле. Самоудерживающая система представляет собой электромагнитное реле, установленное в нижней части контактов нейтрального якоря. Якорь удерживающего электромагнита шарнирно связан специальной тягой с нейтральным якорем основной магнитной системы реле. Рассмотрим принцип действия самоудерживающего комбинированного реле на примере рис. 1.8, а. При изменении направления тока в катушках реле магнитный поток изменяется, в результате чего в дополнительной обмотке 5 возникает ЭДС, которая создает импульс тока в катушке 2 удерживающего электромагнита 1. Поэтому якорь 3 последнего и связанный с ним жесткой тягой нейтральный якорь 4 некоторое время удерживаются в притянутом положении. Этого времени достаточно, чтобы при изменении полярности тока в катушках реле нейтральный якорь не был отпущен. Условное обозначение самоудерживающего комбинированного реле и его контактов показаны на рис. 1.8, б. Кодовые реле КДРШ — двухпозиционные с одним нейтральным якорем, работающим независимо от направления тока в обмотке реле. Эти реле относятся к низшему классу надежности действия, а по времени срабатывания могут быть нормально- и медленнодействующими.
Кодовые реле КДР, КДРШ представляют собой электромагнитные реле постоянного тока облегченной конструкции. В кодовых
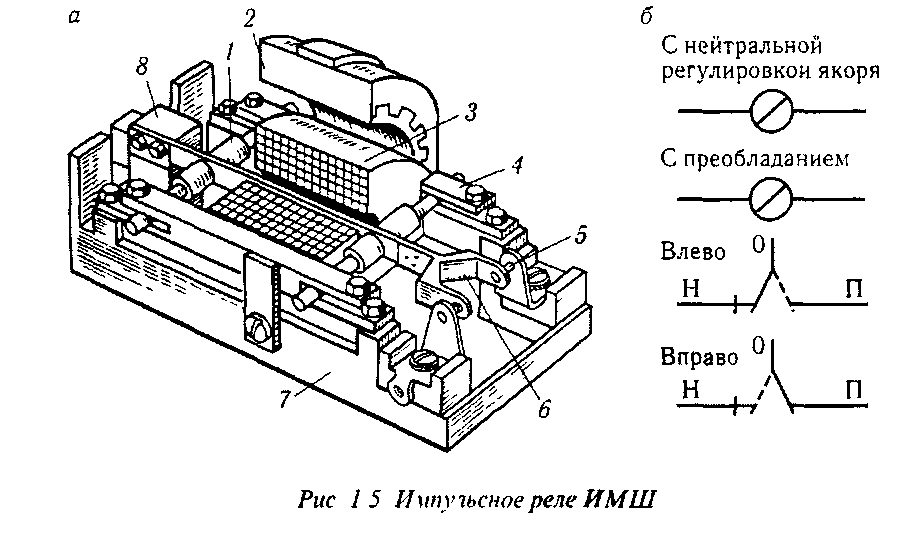
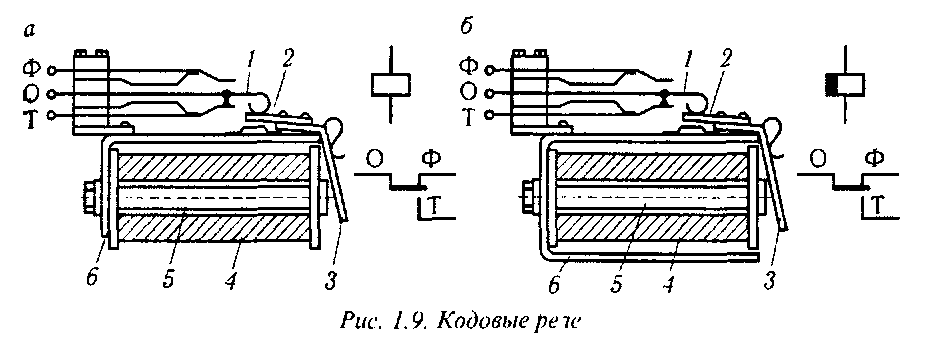
реле используются три разновидности магнитной системы: неразветвленная с Г-образным ярмом (рис. 1.9, а), разветвленная с П-образным ярмом (рис. 1.9, 6) и усиленная разветвленная в медленнодействующих реле. Реле типа КДР (см.рис. 1.9, а) состоит из круглого сердечника 5 с надетой на него катушкой 4, ярма 6, якоря 3, контактных пружин 1. Переключение контактов осуществляется бакелитовой пластинкой 2, жестко связанной с якорем. При протекании тока через катушку якорь притягивается к сердечнику, пластинка и пружина поднимаются вверх, размыкая и замыкая фронтовые контакты. При выключении тока якорь под действием давления контактных пружин отпадает. Фронтовые контакты размыкаются, а тыловые замыкаются. Реле КДРШ по конструкции аналогичны реле КДР, но имеют штепсельное включение. На базе кодовых реле типа КДРТ сконструированы трансмиттерные реле Т, которые предназначены для передачи сигнальных кодов в рельсовые цепи в устройствах автоблокировки и автоматической локомотивной сигнализации. Трансмиттерное реле ТШ-65В работает от импульсов постоянного тока: U= 12 В, а реле ТШ-2000В работает от импульсов переменного тока напряжением 110 или 220 В. Отличительной особенностью трансмиттерных реле от кодовых является наличие усиленных контактов и их схемной защиты, обеспечивающей бездуговое коммутирование, благодаря чему эти реле более надежны в эксплуатации, чем кодовые реле. Все реле постоянного тока рассчитаны для работы в электрических цепях напряжением 12 или 24 В. Некоторые реле постоянного тока используют для работы в цепях переменного тока. К таким реле относятся реле типа НМВШ и АНВШ, АОШ и ОМШ, АПШ и АСШ, ИМВШ. По, принципу действия и конструкции эти реле аналогичны соответствующим типам реле постоянного тока. Отличие состоит в том, что внутри этих реле установлены выпрямительные элементы, которые преобразуют переменный ток в постоянный. В обозначениях этих реле внутри кружочка, изображающего обмотку реле, показывается условное обозначение выпрямительного элемента. Основными электрическими характеристиками перечисленных типов реле являются: напряжение или ток полного подъема якоря; напряжение переброса поляризованного якоря; напряжение или ток отпускания якоря. Реле переменного тока В устройствах железнодорожной автоматики и телемеханики применяют двухэлементные секторные реле переменного тока типа ДСШ. Эти реле используются в качестве путевых в рельсовых цепях переменного тока частотой 50 и 25 Гц. По принципу действия двухэлементные секторные реле относятся к индукционным. Магнитная система реле выполняется на сердечниках из листовой стали для уменьшения потерь на гистерезис. Эти реле относятся к реле 1 класса надежности, а по времени срабатывания — к нормально- действующим. Двухэлементное секторное реле ДСШ со штепсельным включением (рис. 1.10, а) состоит из электромагнитной системы, представляющей собой два разных по назначению железных сердечника с намотанными на них обмотками. Один из них называется местным элементом, другой — путевым. Эти элементы располагаются симметрично один относительно другого. Местный элемент состоит из Ш-образного сердечника 1 с обмоткой 2, которая подключается к местному источнику переменного тока напряжением 110—220 В. Путевой элемент состоит из сердечника 8 с обмоткой 9, которая подключается через рельсовую цепь к путевому трансформатору. Между полюсами сердечников местного и путевого элемента располагается алюминиевый сектор 4, который вращается на оси и при помощи коромысла 3 и тяги 5 управляет контактной системой 6. В реле имеются упорные ролики 7 и 10, ограничивающие движение сектора соответственно вниз и вверх. Принцип действия реле основан на взаимодействии магнитного потока путевого элемента с током, индуцированным в секторе магнитным потоком местного элемента. Когда один из элементов реле находится без тока, то сектор под действием собственного веса находится в нижнем крайнем положении и своим ребром нажимает на нижний упорный ролик. При прохождении переменного тока по катушке местного элемента магнитный поток, созданный током местного элемента, пересекая сектор, наводит в нем ЭДС, отстоящую по фазе на 90 ° от вызвавшего его потока. В результате этого в секторе возникают вихревые токи, которые проходят под полюсами путевого элемента, вступают во взаимодействие с его магнитным потоком и создают вращающий момент, стремящийся повернуть сектор. К аналогичным результатам приводит взаимодействие вихревых токов, созданных магнитным потоком путевого элемента, с магнитным потоком местного элемента. При равенстве магнитных потоков и совпадении их по фазе силы взаимодействия магнитных потоков и
вихревых токов будут равны и противоположно направлены, в результате чего сектор останется в нижнем положении. Для приведения сектора во вращение в направлении его подъема необходимо создать определенный сдвиг фаз между магнитными потоками местного и путевого элементов или между их токами. Таким образом, максимальный вращающий момент будет при угле сдвига фаз ф = 90 0 между токами или магнитными потоками в местном и путевом элементах. Этот вращающий момент перемещает сектор в верхнее положение. Вместе с сектором поворачиваются коромысло и тяга, которая переключает контакты: размыкает тыловые Т и замыкает фронтовые Ф. При выключении тока в путевом элементе магнитный поток исчезает, и под действием собственного веса сектор опустится вниз и возвратит контакты в исходное положение: разомкнет фронтовые Ф и замкнет тыловые Т. Условные обозначения реле ДСШ и его контактов приведены на рис. 1.10,6. Основным достоинством реле ДСШ является надежная фазовая избирательность, поэтому эти реле называют фазочувствительными. Свойство избирательности надежно исключает ложное срабатывание фазочувствительного путевого реле от источника питания смежной рельсовой цепи при замыкании изолирующих стыков, так как путевые обмотки реле включаются таким образом, чтобы положительный вращающий момент и подъем сектора вверх создавались только от тока своей рельсовой цепи. Кроме этого, фазочувствительные реле обеспечивают надежную защиту от влияния помех тягового тока, отличающихся по частоте 1 от тока сигнальной частоты всего на несколько герц. Фазочувствительные реле срабатывают от тока той частоты, что и частота тока в обмотке местного элемента, при определенных фазовых соотношениях между ними. Читайте также: lektsia.com Общие сведения об эвм.Электронно-цифровая вычислит машина– техническая система, предназнач для выполнения вычислений на основе алгоритмов. Алгоритм– точное предписание, к-ое задает в целом вычислит процесс, начинающийся с произвольно допустимых для данного алгоритма исходных данных, и направленный на получение полностью опред-ого этими исходными данными. Важнейшими свойствами алгоритма явл-ся:
Основные характеристики ЭВМ:
По назначению, конструктивным особенностям и структурному построению совр ЭВМ подразд. на:
Структура и принципы построения эвмСтруктура ЭВМ представл собой абстрактную модель, к-ая устанавливает состав, порядок и принципы взаимодействия основных функц-ых частей ЭВМ без учета их реализации. В ЭВМ перерабатывается информация, представляемая в виде совокупности цифр в позиционной СС. Наиболее распр явл-ся двоичная СС. При таком способе кодирования количество цифр в разряде ограничивается двумя и вес любого разряда больше веса соседнего младшего разряда в 2 раза. Наличие в ЭВМ памяти позволяет развернуть вычислит процесс во времени. Любую вычислит задачу, к-ую необходимо решить на ЭВМ первоначально необходимо представить в виде послед-сти опред команд, включающих различные операции. Перечень команд, вып-ых машиной, наз-сясистемой команд машины. Характерными особенностями ЭВМ является:
Разрядная сетка– количество разрядов, исп-ых в ЭВМ для представления чисел.
Все совр ЭВМ содержат 5 осн компонентов (функц-ых устр-в):
Рис 1 – Структурная схема ЭВМ АЛУ и УУ составляют совместно процессор. Процессор– основная часть ЭВМ, непосредственно осуществляющая процесс обработки данных и управляющие работы ЭВМ. АЛ часть– функц-ая часть процессора, выполняемая арифметич и логич действия над данными и предназнач-ая для вып-ия арифметич и логич операций над кодами чисел и команд. В АЛУ входят:сумматор, ряд регистров, логич схемы и элементы управления. ЗУ– предназнач для хранения введенной инф-ции программы вычислений и промежуточных рез-тов вычислений. Инф-ия, содержащаяся в памяти ЗУ и необходимая для решения конкр задачи по мере необходимости выводится из ЗУ и передается АЛУ. После выполнения необх преобразований в АЛУ, она вновь заносится в память и исп-ся по назначению. ЗУ любого ПК подразделяется на:
УУ– выполняет ф-ции управления для обеспеч взаимодействия составных частей ЭВМ. УУ предназначено для приема интерпретации кода команды, а также для выработки последовательности всех управляющих сигналов для выполнения операций, задаваемых командой. Кроме этого УУ анализирует ход решения задачи и обеспечивает в ходе анализа автоматич обработку цифр информации в ЭВМ. С точки зрения аппаратной части УУ сод-т задающий генератор, к-рый вырабатывает последовательные импульсы тактовой частоты, синхронизирующий работу машины. УВВ– предназначено для ручного ввода хранения и автоматич записи в память машины исх данных решаемой задачи, а также программа вычислений. УВЫВ– предназн для автоматич приема результатов вычислений, хранения и выдачи результатов решений в виде, удобном для дальнейшего использования. С точки зрения работы ЭВМ и ее использования, различают след режимы:
Рисунок ЭВМ состоит из: ОЗУ наN-автономных секций, устро-ва обработки инфор-ции – процессора, селекторных (ск) и мультиплексного (мк) каналов, каналов ввода-вывода, местных устр-в управления (МУ), соединенных с внешними устр-ми (ВУ) и другой периферийной техникой. Чтобы была обеспечена возможность параллельной работы процессора и внешних устройств, последние должны иметь технич средства для автономного функц-ия и связи с ОЗУ. С этой целью вводятся унифиц-ые каналы вв/вывода. Внешние устр-ва (ВУ)связываются с этими каналами через собств местные устр-ва управления (МУУ). Это дает возможность распараллелить работу процессора. Селекторный каналсвязывает процессор и операт память с быстродействующими ВУ. Мультиплексный каналможет одновременно обслуживать неск-ко медленно действующих устр-в. Система прерывания- исп-ся для своевременного включения необх устр-в. Оно принимает сигналы, отмечающие моменты окончания операции устройства ЭВМ, прекращает вып-ние текущей программы и передает управление программе, обеспечивая работу другого устройства. Для защиты программы от внешнего воздействия мультипрограммное ЭВМ оснащается средствами защиты памяти, позволяющими каждой программе обращаться только к собств участку памяти. Т.о. исключается возм-сть искажения ииф-ции. Супервизор– распред-т ресурсы ЭВМ и постоянно хранится в его памяти. studfiles.net | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||
|
|
||||||||||||||||||
|