Замена/Модернизация приводов и электрических машин постоянного/переменного тока. Замена двигателя постоянного тока на асинхронныйЗамена двигателей постоянного тока на асинхронные двигатели переменного токаЗамена двигателей постоянного тока на асинхронные двигатели переменного тока Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую). Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т.д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно: 1. Сложность конструкции и, как результат, высокая цена 2. Наличие щеточно-коллекторного узла 3. Большая масса 4. Необходимость в периодическом обслуживании Все эти недостатки требуют существенных затрат при покупке машин постоянного тока и их дальнейшей эксплуатации, а так же они могут значительно снизить надежность и точность систем в целом. Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли. До недавнего времени внедрение асинхронных двигателей (АД) с короткозамкнутыми роторами в системы, где требуется широкий диапазон регулирования скорости, не представлялось возможным, а для изменения скорости движения приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения. С развитием полупроводниковой электроники (разработка IGBT транзисторов), появилась возможность производства недорогих микропроцессорных преобразователей частоты, с помощью которых стало возможным полноценно управлять скоростью асинхронных двигателей в широком диапазоне регулирования (1:1000). Теперь частота вращения АД не зависит от частоты питающей сети, двигатели можно разгонять выше их номинальной скорости. Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока. Асинхронный двигатель – простая, недорогая, не требующая обслуживания машина. Именно эти аргументы привели к тому, что на многих предприятиях машины постоянного тока с тиристорными преобразователями стали заменять на асинхронные двигатели с системами управления, построенными на преобразователях частоты. При подборе асинхронного двигателя взамен машины постоянного тока необходимо учитывать разность характеристик этих машин. Подбор двигателя осуществляется по следующим параметрам: 1. По номинальной скорости вращения Диапазон изменения частоты вращения вала асинхронного двигателя должен быть равен или больше чем у двигателя постоянного тока. 2. По моменту (номинальному, пусковому, максимальному) Номинальный момент асинхронного двигателя должен быть равен или быть больше исходного при условии длительной работы в заданном диапазоне частот вращения без перегрева. Максимальный и пусковой моменты должны быть равны или быть больше пускового момента определенного для данного механизма. На рисунке 1 и 2 представлены механические характеристики асинхронного двигателя и двигателя постоянного тока соответственно. Как видно, на малых скоростях асинхронный двигатель имеет момент значительно меньше номинального в отличие от двигателя постоянного тока. Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
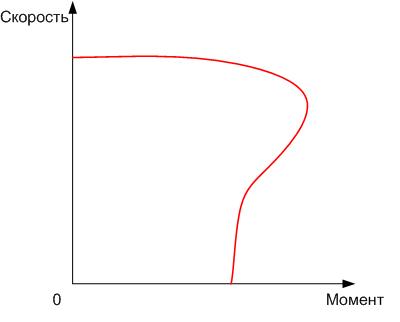
Рис.1 Механическая характеристика асинхронного двигателя
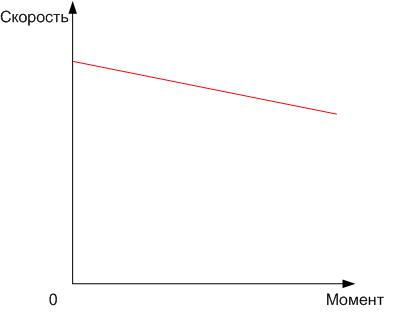
Рис.2 Механическая характеристика двигателя постоянного тока 3. По режиму работы Нагрев электрической машины зависит от режима ее работы, т.е. от соотношения длительности периодов работы и пауз между ними, или периодов работы с полной или частичной нагрузкой, от частоты включения машины и характера протекания переходных процессов. Подразделяют следующие режимы работы: Продолжительный режим (S1) - режим при котором время работы машины при практически неизменных нагрузке и температуре окружающей среды достаточно для нагрева всех ее частей до практически установившейся температуры. Режим характеризуется неизменными потерями в течение всего времени работы машины. Кратковременный режим (S2) - режим при котором периоды неизменной нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз машина охлаждается до холодного состояния. Повторно-кратковременный режим (S3-S8) - отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения, причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины. 4. По условиям эксплуатации Согласно ГОСТ 17498-87 асинхронный двигатель должен иметь соответствующую степень защиты IPXX, где первый символ X означает степень защиты оболочкой, от проникновения инородных твердых тел, второй символ X означает степень защиты оболочкой от вредных воздействий проникающей воды. Например, IP54 - “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”. По всем вопросам, касательно данного применения обращайтесь в ООО "Драйвика" по тел. 8 (812) 635 90 30 или Email: [email protected] www.driveka.ru Замена двигателей постоянного тока на асинхронные двигатели переменного токаЗамена двигателей постоянного тока на асинхронные двигатели переменного тока Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую). Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т.д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно: 1. Сложность конструкции и, как результат, высокая цена 2. Наличие щеточно-коллекторного узла 3. Большая масса 4. Необходимость в периодическом обслуживании Все эти недостатки требуют существенных затрат при покупке машин постоянного тока и их дальнейшей эксплуатации, а так же они могут значительно снизить надежность и точность систем в целом. Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли. До недавнего времени внедрение асинхронных двигателей (АД) с короткозамкнутыми роторами в системы, где требуется широкий диапазон регулирования скорости, не представлялось возможным, а для изменения скорости движения приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения. С развитием полупроводниковой электроники (разработка IGBT транзисторов), появилась возможность производства недорогих микропроцессорных преобразователей частоты, с помощью которых стало возможным полноценно управлять скоростью асинхронных двигателей в широком диапазоне регулирования (1:1000). Теперь частота вращения АД не зависит от частоты питающей сети, двигатели можно разгонять выше их номинальной скорости. Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока. Асинхронный двигатель – простая, недорогая, не требующая обслуживания машина. Именно эти аргументы привели к тому, что на многих предприятиях машины постоянного тока с тиристорными преобразователями стали заменять на асинхронные двигатели с системами управления, построенными на преобразователях частоты. При подборе асинхронного двигателя взамен машины постоянного тока необходимо учитывать разность характеристик этих машин. Подбор двигателя осуществляется по следующим параметрам: 1. По номинальной скорости вращения Диапазон изменения частоты вращения вала асинхронного двигателя должен быть равен или больше чем у двигателя постоянного тока. 2. По моменту (номинальному, пусковому, максимальному) Номинальный момент асинхронного двигателя должен быть равен или быть больше исходного при условии длительной работы в заданном диапазоне частот вращения без перегрева. Максимальный и пусковой моменты должны быть равны или быть больше пускового момента определенного для данного механизма. На рисунке 1 и 2 представлены механические характеристики асинхронного двигателя и двигателя постоянного тока соответственно. Как видно, на малых скоростях асинхронный двигатель имеет момент значительно меньше номинального в отличие от двигателя постоянного тока. Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Рис.1 Механическая характеристика асинхронного двигателя
Рис.2 Механическая характеристика двигателя постоянного тока 3. По режиму работы Нагрев электрической машины зависит от режима ее работы, т.е. от соотношения длительности периодов работы и пауз между ними, или периодов работы с полной или частичной нагрузкой, от частоты включения машины и характера протекания переходных процессов. Подразделяют следующие режимы работы: Продолжительный режим (S1) - режим при котором время работы машины при практически неизменных нагрузке и температуре окружающей среды достаточно для нагрева всех ее частей до практически установившейся температуры. Режим характеризуется неизменными потерями в течение всего времени работы машины. Кратковременный режим (S2) - режим при котором периоды неизменной нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз машина охлаждается до холодного состояния. Повторно-кратковременный режим (S3-S8) - отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения, причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины. 4. По условиям эксплуатации Согласно ГОСТ 17498-87 асинхронный двигатель должен иметь соответствующую степень защиты IPXX, где первый символ X означает степень защиты оболочкой, от проникновения инородных твердых тел, второй символ X означает степень защиты оболочкой от вредных воздействий проникающей воды. Например, IP54 - “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”. По всем вопросам, касательно данного применения обращайтесь в ООО "Драйвика" по тел. 8 (812) 635 90 30 или Email: [email protected] www.driveka.ru Замена электроприводов постоянного тока на асинхронный двигатель и частотный преобразователь1. Замена электроприводов постоянного тока на асинхронный двигатель и частотный преобразователь. Данная работа подразумевает замену как главного электропривода, так и вспомогательных приводов дукторов краски и увлажнения. На всех современных машинах (за исключением старых разработок, до сих пор имеющих спрос и предлагаемых к продаже) в качестве главного привода используется асинхронный двигатель и преобразователь частоты. Это обусловлено высокой надежностью и низкой стоимостью асинхронного двигателя по сравнению с двигателем постоянного тока. Что касается частотного преобразователя, то сравнивать его стоимость с аналоговым приводом постоянного тока, использовавшимся несколько лет назад, не совсем корректно. Такие приводы, ввиду их низкой надежности и нестабильности параметров, ведущими мировыми производителями выпускаются только в качестве запчастей. Стоимость современного цифрового привода постоянного тока зачастую превышает стоимость частотного преобразователя, т.к. спрос на них значительно ниже, а дальнейшее совершенствование и развитие данного типа привода не входит в круг интересов производителей, т.к. не предполагает отдачи от таких разработок. Различные встроенные функции частотного преобразователя, как, например, самонастройка на используемый двигатель, постоянный контроль тока, напряжения, температуры двигателя и преобразователя и полная самодиагностика делают его применение высокоэффективным и надежным. Первым в истории электроприводом был привод с двигателем переменного тока без регулирования скорости. Для изменения скорости приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения. С появлением и развитием полупроводниковой электроники в качестве электропривода стали применяться двигатели постоянного тока с регулированием скорости вращения путем изменения напряжения на якоре или обмотке возбуждения. Регулирование частоты вращения асинхронных двигателей за счет изменения частоты питающей сети, как единственно возможный способ регулирования, было достаточно сложным, громоздким и дорогостоящим удовольствием. Дальнейшие достижения в области электроники, особенно с появлением цифровой и микропроцессорной техники, позволили компенсировать этот недостаток путем использования современных средств управления. Развитие технологий и появление на рынке мощных и недорогих полупроводниковых импульсных ключей и IGBT транзисторов привело к появлению современных частотных преобразователей, позволяющих легко управлять скоростью вращения асинхронного двигателя и отслеживать его состояние путем измерения векторов тока, напряжения или с применением замкнутых систем регулирования. В настоящее время все чаще в качестве главного привода в новых разработках машин применяется асинхронный двигатель с частотным преобразователем векторного типа или с обратной связью по скорости (в зависимости от диапазона регулирования). Последние достижения в области силовой электроники и микропроцессорной технике позволили значительно уменьшить стоимость комплектующих изделий частотного преобразователя при возросшей надежности этих изделий. В качестве частотного преобразователя нами используются изделия иностранных фирм. Анализ аналогичных изделий отечественного производства показывает, что все приводы изготавливаются с применением импортных комплектующих, таких как силовые IGBT модули и специализированные процессоры управления, не изготавливаемых Российской промышленностью. Поэтому стоимость таких приводов при мелкосерийном производстве единичным предприятием не может быть ниже импортных, которые выпускаются тысячными партиями в год на нескольких специализированных производствах. Так вышеназванные иностранные фирмы имеют несколько десятков заводов и представителей в разных странах мира, что позволяет постоянно отслеживать качество выпускаемых изделий. Имея собственных разработчиков, эти фирмы имеют возможность постоянно обновлять и улучшать выпускаемые изделия с появлением новых разработок в электронике. Сравнивая стоимость комплектного привода (преобразователь + двигатель) можно заключить, что в настоящее время до мощности 5…7 кВт стоимость частотного привода дешевле по сравнению с аналоговым приводом постоянного тока. В случае применения современного цифрового привода постоянного тока стоимость частотных приводов меньше во всем диапазоне мощностей. Недостатком аналогового привода постоянного тока является низкая помехоустойчивость, сложность в настройке и нестабильность параметров. В качестве датчика обратной связи по скорости применяется тахогенератор, имеющий те же недостатки, что и коллекторный двигатель. Для реверсивных приводов после тахогенератора приходится устанавливать диодный мост, что ограничивает диапазон регулирования на малых скоростях из-за пропадания обратной связи. В случае спарки механизмов с различными приводами в режиме «ведущий – ведомый» частотный преобразователь намного предпочтительней, т.к. в качестве датчика скорости применяются цифровые датчики типа энкодера, резольвера или sin/cos преобразователи, что позволяет строить системы с виртуальными валами. Наличие дополнительных устройств (опций) частотных преобразователей позволяют наращивать функции последних: увеличивать число входов выходов, использовать современные шины и протоколы обмена, применять привод в устройствах позиционирования, следить за температурным режимом двигателя и привода, использовать привод в режиме виртуального кулака (переменная скорость вращения за один оборот вала) и многое другое. Современные микроконтроллеры, обслуживающие частотные преобразователи, позволяют обрабатывать данные за период в несколько десятков микросекунд, (десять лет назад это время составляло 200 мС), что позволило расширить диапазон регулирования с обратной связью до 1:5000 с точностью поддержания скорости 0,2 оборота во всем диапазоне, что приближает данные привода к сервоприводам. Меньшая масса ротора асинхронного двигателя по сравнению с якорем двигателя постоянного тока позволяет повысить динамику привода в следящих и быстродействующих системах. В целях сокращения простоев машины у клиента в типографии, производя замену главного электропривода, мы заранее размещаем и монтируем частотный преобразователь и остальное сопутствующее ему электрооборудование в небольшом отдельном электрическом шкафе. При монтаже нового оборудования необходимо подключить только двигатель, цепи управления и питания, при этом время, необходимое на перемонтаж, не превышает одной смены. Автор: Чубов А.В. pechatnick.com Замена двигателей постоянного тока на асинхронные двигатели переменного токаЗамена двигателей постоянного тока на асинхронные двигатели переменного тока Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую). Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т.д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно: 1. Сложность конструкции и, как результат, высокая цена 2. Наличие щеточно-коллекторного узла 3. Большая масса 4. Необходимость в периодическом обслуживании Все эти недостатки требуют существенных затрат при покупке машин постоянного тока и их дальнейшей эксплуатации, а так же они могут значительно снизить надежность и точность систем в целом. Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли. До недавнего времени внедрение асинхронных двигателей (АД) с короткозамкнутыми роторами в системы, где требуется широкий диапазон регулирования скорости, не представлялось возможным, а для изменения скорости движения приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения. С развитием полупроводниковой электроники (разработка IGBT транзисторов), появилась возможность производства недорогих микропроцессорных преобразователей частоты, с помощью которых стало возможным полноценно управлять скоростью асинхронных двигателей в широком диапазоне регулирования (1:1000). Теперь частота вращения АД не зависит от частоты питающей сети, двигатели можно разгонять выше их номинальной скорости. Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока. Асинхронный двигатель – простая, недорогая, не требующая обслуживания машина. Именно эти аргументы привели к тому, что на многих предприятиях машины постоянного тока с тиристорными преобразователями стали заменять на асинхронные двигатели с системами управления, построенными на преобразователях частоты. При подборе асинхронного двигателя взамен машины постоянного тока необходимо учитывать разность характеристик этих машин. Подбор двигателя осуществляется по следующим параметрам: 1. По номинальной скорости вращения Диапазон изменения частоты вращения вала асинхронного двигателя должен быть равен или больше чем у двигателя постоянного тока. 2. По моменту (номинальному, пусковому, максимальному) Номинальный момент асинхронного двигателя должен быть равен или быть больше исходного при условии длительной работы в заданном диапазоне частот вращения без перегрева. Максимальный и пусковой моменты должны быть равны или быть больше пускового момента определенного для данного механизма. На рисунке 1 и 2 представлены механические характеристики асинхронного двигателя и двигателя постоянного тока соответственно. Как видно, на малых скоростях асинхронный двигатель имеет момент значительно меньше номинального в отличие от двигателя постоянного тока. Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Рис.1 Механическая характеристика асинхронного двигателя
Рис.2 Механическая характеристика двигателя постоянного тока 3. По режиму работы Нагрев электрической машины зависит от режима ее работы, т.е. от соотношения длительности периодов работы и пауз между ними, или периодов работы с полной или частичной нагрузкой, от частоты включения машины и характера протекания переходных процессов. Подразделяют следующие режимы работы: Продолжительный режим (S1) - режим при котором время работы машины при практически неизменных нагрузке и температуре окружающей среды достаточно для нагрева всех ее частей до практически установившейся температуры. Режим характеризуется неизменными потерями в течение всего времени работы машины. Кратковременный режим (S2) - режим при котором периоды неизменной нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз машина охлаждается до холодного состояния. Повторно-кратковременный режим (S3-S8) - отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения, причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины. 4. По условиям эксплуатации Согласно ГОСТ 17498-87 асинхронный двигатель должен иметь соответствующую степень защиты IPXX, где первый символ X означает степень защиты оболочкой, от проникновения инородных твердых тел, второй символ X означает степень защиты оболочкой от вредных воздействий проникающей воды. Например, IP54 - “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”. По всем вопросам, касательно данного применения обращайтесь в ООО "Драйвика" по тел. 8 (812) 635 90 30 или Email: [email protected] www.driveka.ru FAQ по электродвигателям | ТехприводКакие электродвигатели применяются чаще всего?Какие способы управления электродвигателями используются?Как прозвонить электродвигатель и определить его сопротивление?Как определить мощность электродвигателя?Как увеличить или уменьшить обороты электродвигателя?Как рассчитать ток и мощность электродвигателя?Как увеличить мощность электродвигателя?Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?Какие исполнения двигателей бывают?Зачем электродвигателю тормоз?Как двигатель обозначается на электрических схемах?Почему греется электродвигатель?Типичные неисправности электродвигателейЗадать свой вопрос 1. Какие электродвигатели применяются чаще всего? Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги. Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы. Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт. В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными. 2. Какие способы управления электродвигателями используются на практике? Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы. Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник». Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом. 3. Как прозвонить электродвигатель и определить его сопротивление? Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны. Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот. 4. Как определить мощность электродвигателя? Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов. Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле). Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2. 5. Как увеличить или уменьшить обороты электродвигателя? Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме. Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато. Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов. 6. Как рассчитать ток и мощность электродвигателя? Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу: Р = I (1,73·U·cosφ·η) где: Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике), I – ток двигателя, А, U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»), cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8). Для расчета тока по известной мощности пользуются обратной формулой: I = P/(1,73·U·cosφ·η) Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2. 7. Как увеличить мощность электродвигателя? Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор. При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо. Если приведенные советы неприменимы – придётся менять двигатель на более мощный. 8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)? При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки. 9. Какие исполнения двигателей бывают? В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже. Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.). Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55. 10. Зачем электродвигателю тормоз? В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах. 11. Как двигатель обозначается на электрических схемах? Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже. 12. Почему греется электродвигатель? Двигатель может нагреваться по одной из следующих причин:
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода. 13. Типичные неисправности электродвигателей Выделяют два вида неисправностей электродвигателей: электрические и механические. К электрическим относятся неисправности, связанные с обмоткой:
Для устранения этих неисправностей требуется перемотка двигателя. Механические неисправности:
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя. Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь! Другие полезные материалы:Выбор электродвигателяИспользование тормозных резисторов с преобразователями частоты tehprivod.ru Замена/Модернизация приводов и электрических машин постоянного/переменного токаЗамена привода постоянного тока. Замена устаревших аналоговых моделей преобразователей постоянного тока на современные цифровые устройства позволяет повысить надежность электропривода, интегрировать привод в современную АСУ предприятия посредством унифицированных сигналов и коммуникационных протоколов, повысить качество регулирования скорости или момента двигателя. При этом регулирование скорости может быть двухзонным, так как цифровые преобразователи управляют не только напряжением обмотки якоря, но и напряжением обмотки возбуждения. Также следует отметить простоту настройки и эксплуатации таких преобразователей — все параметры двигателя и требуемые характеристики его работы задаются в реальных величинах посредством кнопочных панелей и цифрового дисплея, на который так же можно вывести текущие значения скорости, тока, напряжения и т.д. Компания «Привод автоматика» производит все этапы модернизации оборудования: от составления проекта до наладки привода. Модернизация привода постоянного тока. Модернизация заключается в замене дорогостоящих двигателей постоянного тока на доступные и распространенные асинхронные двигатели частотного регулирования, работающие под управлением частотных преобразователей. Опытная эксплуатация показала полное соответствие двигателей АДЧР, оборудованного частотным преобразователем требованиям, предъявляемым к регулируемому приводу подачи станка. Модернизация привода проводится с учетом следующих требований:
Использование в станочном оборудовании асинхронных двигателей управляемых частотными преобразователями в качестве регулируемого привода имеет ряд важных преимуществ:
Так же возможна установка сервоприводов. Сервопривод представляет собой специализированный преобразователь частоты с широкой полосой пропускания контуров скорости и тока в паре с машиной переменного тока со специальным магнетиком, обладающим высокой плотностью магнитного потока на валу ротора, создающим постоянное магнитное поле, которое взаимодействует с вращающимся полем статора. Преобразователь получает информацию о положении и скорости ротора двигателя через датчик обратной связи (энкодер, резольвер), за счет чего обладает высоким быстродействием и широким диапазоном регулирования.
Замена нерегулируемого электропривода с асинхронным двигателем. В настоящее время большинство электроприводов составляют нерегулируемые привода с асинхронными двигателями. Их применяют в водоснабжении и теплоснабжении, вентиляционных системах и кондиционирования воздуха, компрессорных установках. В таких установках плавная регулировка скорости вращения позволяет в большинстве случаев отказаться от использования редукторов, вариаторов, дросселей и другой регулирующей аппаратуры. Это значительно упрощает механическую систему, повышает ее надежность и снижает эксплуатационные расходы. При подключении через частотный преобразователь пуск двигателя происходит плавно, без пусковых токов и ударов, что снижает нагрузку на двигатель и механизмы, увеличивает срок их эксплуатации. Для совместной работы с преобразователями частоты рекомендуется так же заменять асинхронный двигатель. Компания “Привод-Автоматика” предлагает асинхронные двигатели собственного производства серии АДЧР различных модификаций предназначенных для работы в условиях частотного регулирования. Применение регулируемого электропривода позволяет получить экономию энергии до 75%. Сбережение энергии происходит путем устранения непроизводительных затрат в заслонах, дросселях и других регулирующих устройствах. При замене нерегулируемого привода, работающего в режиме периодических включений, исключаются потери на пусковые токи и снижается требуемая мощность двигателя. Регулирование в системе водоснабжения в соответствии с графиком потребления воды позволяет получить значительную экономию, как электроэнергии, так и воды, уменьшить количество аварий из-за разрывов трубопроводов. privodavtomatika.ru Замена Двигателя Постоянного Тока (ДПТ)Замена Двигателя Постоянного Тока (ДПТ)В настоящее время, предприятия различных сфер промышленности эксплуатируют большое количество двигателей постоянного тока, которые были выпущены 25 и более лет назад. Эти двигатели давно выработали свой ресурс и, зачастую, неоднократно подвергались капитальному ремонту магнитной, электрической и механической систем. Такие ремонты позволяют частично восстановить работоспособность электродвигателя в недолгосрочной временной перспективе. Зачастую, стоимость капитального ремонта сопоставима со стоимостью нового электродвигателя АДЧР в требуемой комплектации, а стоимость нового ДПТ равна, а иногда и больше стоимости КЭП, требуемого для замены ДПТ. Основной проблемой при замене ДПТ является несоответствие установочно-присоединительных размеров различных серий двигателей. Производственные мощности ООО «СОПТЕХ», профессионализм сотрудников и многолетний опыт изготовления, ремонта и модернизации электродвигателей различных серий позволяют изготавливать электродвигатели АДЧР с нестандартными присоединительными размерами щитов (квадратные фланцы, фланцы больших или меньших диаметров), нестандартными диаметрами и формами валов (шлицевой, конический, шестеренчатый и др.), второй конец вала в любых исполнениях, расположение клеммной коробки (сверху, сзади, сбоку), степень защиты (IP55, 65, 67), климатические исполнения У2, У1, УХЛ1,2, Т2,3 и др. Специалистами ООО «СОПТЕХ» накоплен многолетний опыт замены двигателей постоянного тока различных серий (Д808, ДТП, П, 2П, ПФ, ДКУ, ДК, ДПМ, ПБС, ПБСТ и других) на комплектный электропривод КЭП на базе асинхронного электродвигателя АДЧР. Для подбора замены ДПТ необходимы следующие данные (если есть возможность их найти):
По вопросам замены двигателя постоянного тока (ДПТ) обращайтесь в отдел продаж ООО «СОПТЕХ» по телефону +7 499 372 1945 или e-mail: [email protected] По техническим вопросам по e-mail: [email protected] www.sopteh.ru |
|
||||||||||||||||||
|
|
||||||||||||||||||
|