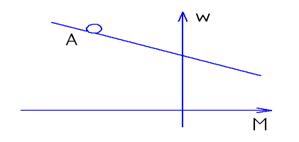
28 Приведите механическую характеристику ад, отметьте на ней характерные точки. Какая электрическая машина и в каком режиме работает в точке аПриведите механическую характеристику АД, отметьте на ней характерные точки.⇐ ПредыдущаяСтр 3 из 9Следующая ⇒Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Рис. 1. Механическая характеристика асинхронного двигателя n1- точка синхр.ск. вращен.эд М=0 Нм n1=60 f1/p w1=2Пf1/p Nн-точка номинальной работы эд (Мн, nн,wн) wн=П nн/30 Мн=Рн/wн Nк-точка мах или критическогомомента эд(Ммах=Мкр, nкр) Ммах=Мкр=Мкр*Мн Sкр=Sн(Мкр+ Какая электрическая машина и в каком режиме работает в точке «А»?
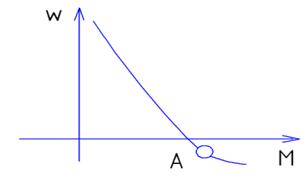
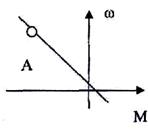
Двигатель постоянного тока в режиме рекуперативного торможения Рекуперативное торможение (генераторный режим) с отдачей энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или другой причины угловая частота вращения ротора асинхронной машины превысит синхронную частоту ω0. В генераторном режиме скольжение s<0, ток и момент вращения также меняют знак. Режим рекуперативного торможения может быть реализован в системе преобразователь частоты - АД при остановке электродвигателя или при переходе с большей частоты вращения на меньшую. Рекуперативное торможение является наиболее экономичным видом торможения АД.
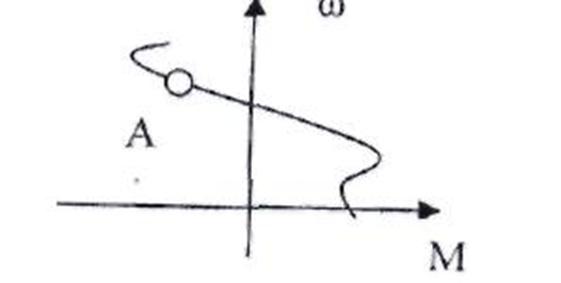
Какая электрическая машина и в каком режиме работает в точке «А»?
???1Какая электрическая машина и в каком режиме работает в точке «А». Двигатель постоянного тока параллельного возбуждения в генераторном режиме.
У двиг постоянного тока внутреннее сопротивелние складываются из следующих: Генераторный режим осуществляется в том случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его ЭДС Е больше приложенного напряжения U. Двигатель здесь работает, а режиме генератора параллельно с сетью, который он дает электрическую энергию; ток при этом изменяет свое направление. U=IR-E, E>U, если n>n0
33. Какая электрическая машина и в каком режиме работает «А».
Механическая характеристика двигателя постоянного тока последовательного возбуждения, в тормозном режиме по способу противовключением. При торможении противовключением в цепь якоря двигателя вводиться дополнительный резистор для ограничения тока.
Как по формуле Клосса построить механические характеристики АД? На практике широко используют приближенное аналитическое выражение механической характеристики с использованием данных, приведенных в каталогах на электродвигатели: кратность моментов Для расчета кривой 1) по каталожным данным 2) зная отношение В области малых скольжений слагаемые
На рис. 3.4 построены рабочие участки (от холостого хода до номинальной нагрузки) механических характеристик для различных сопротивлений в цепи ротора в виде прямых линий, имеющих больший наклон при увеличении активного сопротивления ротора. Часто построение кривых моментов ведут по упрощенной формуле Клосса:
. 32 Как по каталожным данным АД определить sкр? Номинальный момент на валу двигателя
Критический момент Мк = kм х Мн = 1,8 х 139,3 = 250,7 Н•м. Критическое скольжение находим подставив М = Мн, s = sн и Мк / Мн = kм.
кратность максимального момента kм (перегрузочная способность) Читайте также: lektsia.com Какая электрическая машина и в каком режиме работает «А». — Студопедия.Нет⇐ ПредыдущаяСтр 7 из 30Следующая ⇒Механическая характеристика двигателя постоянного тока последовательного возбуждения, в тормозном режиме по способу противовключением. При торможении противовключением в цепь якоря двигателя вводиться дополнительный резистор для ограничения тока.
Какая электрическая машина и в каком режиме работает в точке «А»
Двигатель постоянного тока в режиме рекуперативного торможения Рекуперативное торможение (генераторный режим) с отдачей энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или другой причины угловая частота вращения ротора асинхронной машины превысит синхронную частоту ω0. В генераторном режиме скольжение s<0, ток и момент вращения также меняют знак. Режим рекуперативного торможения может быть реализован в системе преобразователь частоты - АД при остановке электродвигателя или при переходе с большей частоты вращения на меньшую. Рекуперативное торможение является наиболее экономичным видом торможения АД.
Какая электрическая машина и в каком режиме работает в точке «А»
Режиме рекуперативного торможения ротор (якорь) подключенного к сети электродвигателя вращается со скоростью, большей ωо. В этом случае ток изменяет направление, электрическая машина становится генератором, работающим параллельно с сетью, энергия торможения за вычетом потерь отдается в электрическую сеть.
Какая электрическая машина работает в режиме рекуперативного торможения, какие при этом осуществляется преобразования энергии У ДПТ независимого и параллельного возбуждения 3 режима торможения включая генераторный( рекуперативный) Если скорость двигателя оказывается выше скорости идеального холостого хода ω0 то ЭДС машины становится больше напряжения сети. Ток якоря, как следует из уравнения Iя=Uя∙E/Rя становится отрицательным. Следовательно, меняется и знак момента – он становится тормозным. Машина работает в генераторном режиме: механическая энергия, поступающая со стороны вала машины, преобразуется в электрическую и отдается в сеть. Характеристики генераторного режима с отдачей (рекуперацией) энергии являются продолжением характеристик двигательного режима и располагаются во II квадрате. Генераторный режим торможения используется, например, в приводах транспортных и подъемных механизмов при спуске грузов. Способ весьма экономичен, т.к. энергия отдается в сеть.
Какие аппараты относятся к контакторам Конта́ктор — двухпозиционный электромагнитный аппарат, предназначенный для частых дистанционных включений и выключений силовых электрических цепей в нормальном режиме работы. Выключатель путевой: однополюсный, выключатель кнопочный нажимной:с замыкающим контактом, с размыкающим контактом, контакт электротеплового реле, выключатель трехполюсный с автоматическим возвратом, контакт для коммутации сильноточной цепи (контактора, пускателя) замыкающий, контакт замыкающий с замедлением, действующим, контакт коммутационного устройства, контакт размыкающий с замедлением, контакт контактного соединения и др.
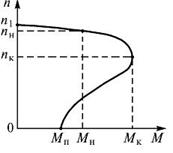
Дата добавления: 2018-02-15; просмотров: 45; ЗАКАЗАТЬ РАБОТУ studopedia.net 28 Приведите механическую характеристику ад, отметьте на ней характерные точки.Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Рис. 1. Механическая характеристика асинхронного двигателя n1- точка синхр.ск. вращен.эд М=0 Нм n1=60 f1/p w1=2Пf1/p Nн-точка номинальной работы эд (Мн, nн,wн) wн=П nн/30 Мн=Рн/wн Nк-точка мах или критическогомомента эд(Ммах=Мкр, nкр) Ммах=Мкр=Мкр*Мн Sкр=Sн(Мкр+) 4-я точка (Мтип,nтип) Мтип=Мтип1*Мн nтип=n1(1-Sтип) Sтип=0,84-0,86 5-я точка(Мп, nп) Sп1=1 Мп=Мп1*Мн, 29 Какая электрическая машина и в каком режиме работает в точке «а»?
Двигатель постоянного тока в режиме рекуперативного торможения Рекуперативное торможение (генераторный режим) с отдачей энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или другой причины угловая частота вращения ротора асинхронной машины превысит синхронную частоту ω0. В генераторном режиме скольжение s<0, ток и момент вращения также меняют знак. Режим рекуперативного торможения может быть реализован в системе преобразователь частоты - АД при остановке электродвигателя или при переходе с большей частоты вращения на меньшую. Рекуперативное торможение является наиболее экономичным видом торможения АД. 31 Как по формуле Клосса построить механические характеристики ад?На практике широко используют приближенное аналитическое выражение механической характеристики с использованием данных, приведенных в каталогах на электродвигатели: кратность моментов ки номинальное скольжение(при отсутствии величин сопротивлений). Для расчета кривой формулу Клосса используют в следующем порядке:
В области малых скольжений слагаемые изначительно меньшеи ими можно пренебречь. Тогда участки кривыхипри малых скольжениях будут практически прямолинейными: . На рис. 3.4 построены рабочие участки (от холостого хода до номинальной нагрузки) механических характеристик для различных сопротивлений в цепи ротора в виде прямых линий, имеющих больший наклон при увеличении активного сопротивления ротора. Часто построение кривых моментов ведут по упрощенной формуле Клосса:
. 32 Как по каталожным данным ад определить sкр?Номинальный момент на валу двигателя
Критический момент Мк = kм х Мн = 1,8 х 139,3 = 250,7 Н•м. Критическое скольжение находим подставив М = Мн, s = sн и Мк / Мн = kм.
кратность максимального момента kм (перегрузочная способность) studfiles.net 38 Нарисуйте схему, обеспечивающую динамическое торможение асинхронной машиныДинамическое торможение. Этот способ осущ-ся путем отключения статора от сети переменного тока и включения обмотки статора на сеть постоянного тока (рис. 3.34). В двигательном режиме замкнуты контакты К1 и разомкнуты контакты К2. В тормозном режиме контакты К1 разомкнуты, а К2 замкнуты. В результате МДС статора создает неподвижное магнитное поле. Взаимодействие магнитного поля статора с током ротора создает на валу двигателя тормозной момент. Механические тормозные характеристики показаны рис. 3.35. В этом случае ротор тормозится до полной остановки без дополнительных устройств.
39 Нарисуйте схему динамического торможения мпт последовательного возбуждения с самовозбуждением.
Рис. 10.65. Схемы машины с последовательным возбуждением в режимах двигательном (а) и динамического торможения (б) 40 Приведите схему динамического торможения МПТ параллельного возбуждения . Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т 41 Приведите вид мех-ой ха-ки торможения противовключением МПТ последовательного возбуждения «набросом» нагрузки.
Рисунок 1.2-Механические характеристики двигателя постоянного тока последовательного возбуждения при торможении противовключением 42 Приведите вид мех-ой хар-ки асинхронной машины, работающей в режиме динамического торможения. Взаимодействие магнитного поля статора с током ротора создает на валу двигателя тормозной момент. Механические тормозные характеристики показаны рис. 3.35. В этом случае ротор тормозится до полной остановки без дополнительных устройств.
43 Как определяется диапазон регулирования скорости вращения электропривода Диапазон регулирования – это отношение возможных установившихся скоростей D=wmax/wmin. На сегодняшний день сформировалось два основных класса систем векторного управления — бездатчиковые системы (без датчика скорости на валу двигателя) и системы с обратной связью по скорости. Применение того или иного метода векторного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу двигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости. 44 От чего зависит стабильность угловой скорости электропривода?Стабильность угловой скорости – характеризуется изменением угловой скорости при заданном отключении момента нагрузки и зависит от жесткости механической характеристики. Она тем выше, чем больше жесткость характеристики. studfiles.net Как по формуле Клосса построить механические характеристики АД? — КиберПедияДля расчета кривой формулу Клосса используют в следующем порядке: 1) по каталожным данным и определяют ; 2) зная отношение и , задаются значениями от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные. . Часто построение кривых моментов ведут по упрощенной формуле Клосса:
32 Как по каталожным данным АД определить sкр? Номинальный момент на валу двигателя кратность максимального момента kм (перегрузочная способность) Перечислите известные Вам тормозные режимы электрических машин. Торможение электропривода посредством переключения обмоток фаз (торможение противовключением) Динамическое торможение характеризуется тем, что электрическая машина работает генератором (динамо рекуперативного торможения ротор (якорь) подключенного к сети электродвигателя вращается со скоростью, большей ωо. Какая электрическая машина и в коком режиме работает в точке «А»? В первом рисунке дпт последовательного возбуждения асинхронного двигателя 35 Какая электрическая машина работает в режиме рекуперативного торможения, какие при этом осуществляется преобразования энергии?
У двигателей независимого и параллельного возбуждения 3 режима торможения включая генераторный( рекуперативный) Машина работает в генераторном режиме: механическая энергия, поступающая со стороны вала машины, преобразуется в электрическую и отдается в сеть. Характеристики генераторного режима с отдачей (рекуперацией) энергии являются продолжением характеристик двигательного режима и располагаются во II квадрате.
36 Электрическая машина работает в режиме динамического торможения. Какие при этом осуществляются преобразования энергии?Машина в этом случае работает в режиме генератора. Механическая энергия, поступающая со стороны вала, преобразуется в электрическую и выделяется в виде тепла в сопротивлениях цепи якоря. 37 Приведите механические характеристики машины постоянного тока последовательного возбуждения, работающей в режиме динамического торможения с самовозбуждением. . Характеристики динамического торможения с самовозбуждением Нарисуйте схему, обеспечивающую динамическое торможение асинхронной машины 39 Нарисуйте схему динамического торможения машины постоянного тока последовательного возбуждения с самовозбуждением. двигательном (а) и динамического торможения (б) Приведите схему динамического торможения машины постоянного Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т Приведите вид механической характеристики торможения противовключением МПТ последовательного возбуждения «набросом» нагрузки.
cyberpedia.su 57) На основании какого закона осуществляется приведение сил сопротивления в электрическом приводе.Приведение сил сопротивления — производится аналогично приведению моментов. Если скорость поступательного движения v, м/с, а угловая скорость вала двигателя wД, рад/с, то: , где FC,M- сила сопротивления производственного механизма, Н. Тогда приведенный к скорости вала двигателя момент сопротивления будет: , В случае приведения вращательного движения к поступательному приведенное усилие: , 58) Какая электрическая машина и в каком режиме работает «А». Механическая характеристика двигателя постоянного тока последовательного возбуждения, в тормозном режиме по способу противовключением. При торможении противовключением в цепь якоря двигателя вводиться дополнительный резистор для ограничения тока.
59) Особенности применения метода трех касательных для определения постоянной нагрева. Метод 3-х касательных заключается в том, что проводится 3 касательные. Первую точку проводят в точке 0, вторую в точке 0,5τуст, а 3-ью в точке 0,8τуст studfiles.net 1 Дайте определение электропривода.Электропривод – это электромеханическая система, состоящая из устройства преобразования (ПрУ), эл. Машины (ЭМ), передаточного устройства (ПУ), устройства управления и защиты (УУ) и рабочих органов технологической машины (РОТМ). Источником энергии эл.привода является электрическая сеть. Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Электропривод – это электромеханическая система, состоящая, в общем случае, из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесс. 2 Дайте определение электропривода в виде структурной схемы.1) Взаимная связь элементов, входящих в состав электропривода в общем виде представлена на рис. 1.1 в виде структурной схемы.
ИЭ – источник энергии, ЭП – эл.преобразователь, ЭМП – электромех-ий преобраз-ль, МП –мех-ий преобраз-ль, РО – рабочий орган, РМ – рабочий механизм, СУТП – система управления технолог-им процессом, УУ – управляющее устройство, Д- датчики, ТП – технолог-ий процесс. 2) Источником энергии эл.привода является электрическая сеть. Эл.сеть ПрУ ЭМ ПУ РОТМ УУ ПрУ – устойство, кот. согласует напр.сети и эл.машины ПУ – механич.система,кот. Согласует параметры эл.машины с технол.машины 3) 1-электрическая сеть, 2-преобразовательное устройство(тр-р, преобраз.), 3-ЭД. 4-передаточное устройство(редуктор), 5-рабочий орган, 6-устройство управления. ИЛИ Основным элементом любого электропривода 6 служит электрический двигатель 1, который вырабатывает механическую энергию (МЭ) за счет потребляемой электрической энергии, т.е. является электромеханическим преобразователем энергии. От электродвигателя механическая энергия через передаточное устройство 9 (механическое, гидравлическое, электромагнитное) подается на исполнительный орган 7 рабочей машины 8, за счет чего тот совершает требуемое механическое движение. Функция передаточного устройства заключается в согласовании параметров движения электродвигателя и исполнительного органа 3 Дайте определение группового электропривода.1) Групповым электроприводом называется такой привод, в котором от одного электродвигателя с помощью одной или нескольких трансмиссий движение передается группе рабочих машин. 2) Кинематическая цепь в таком приводе сложна и громоздка, а сам электропривод является неэкономичным, усложняется его эксплуатация и автоматизация технологических процессов. Вследствие этого трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному. Групповой электропривод состоит из одного электрического двигателя, который через трансмиссию и контрпривод приводит в движение несколько исполнительных механизмов. Контрпривод представляет собой короткий вал, лежащий в подшипниках. На валу расположены ступенчатый шкив, рабочий (связанный с валом) и холостой (свободно сидящий на валу) шкивы. Контрпривод дает возможность изменять скорость вращения станка (при помощи ступенчатого шкива), останавливать и пускать станок (при помощи рабочего или холостого шкива). Остановка приводного двигателя приводит к прекращению работы всех исполнительных механизмов, получающих от него механическую энергию. При работе только части исполнительных механизмов групповой привод имеет низкий КПД. Эл. Сеть ПрУ УУ ЭМ
ПУ1 ПУ2 … ПУn РОТМ1 РОТМ2 … РОТМn studfiles.net |
|
||||||||||||||||||
|
|
||||||||||||||||||
|
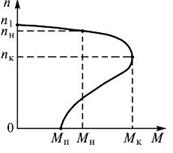
 ) 4-я точка (Мтип, nтип) Мтип=Мтип1*Мн nтип=n1(1-Sтип) Sтип=0,84-0,86 5-я точка(Мп, nп) Sп1=1 Мп=Мп1*Мн,
) 4-я точка (Мтип, nтип) Мтип=Мтип1*Мн nтип=n1(1-Sтип) Sтип=0,84-0,86 5-я точка(Мп, nп) Sп1=1 Мп=Мп1*Мн,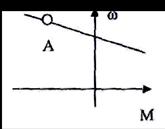
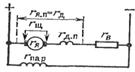
 - соответственно сопротивление щеток, добавочных полюсов,последоват обмотки возбуждения и паралелльной обмотки возбуждения.
- соответственно сопротивление щеток, добавочных полюсов,последоват обмотки возбуждения и паралелльной обмотки возбуждения.
 к
к  и номинальное скольжение
и номинальное скольжение  (при отсутствии величин сопротивлений).
(при отсутствии величин сопротивлений). формулу Клосса используют в следующем порядке:
формулу Клосса используют в следующем порядке: и
и  ;
; и
и  от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные.
от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные. и
и  значительно меньше
значительно меньше  и ими можно пренебречь. Тогда участки кривых
и ими можно пренебречь. Тогда участки кривых  при малых скольжениях будут практически прямолинейными:
при малых скольжениях будут практически прямолинейными: .
.